
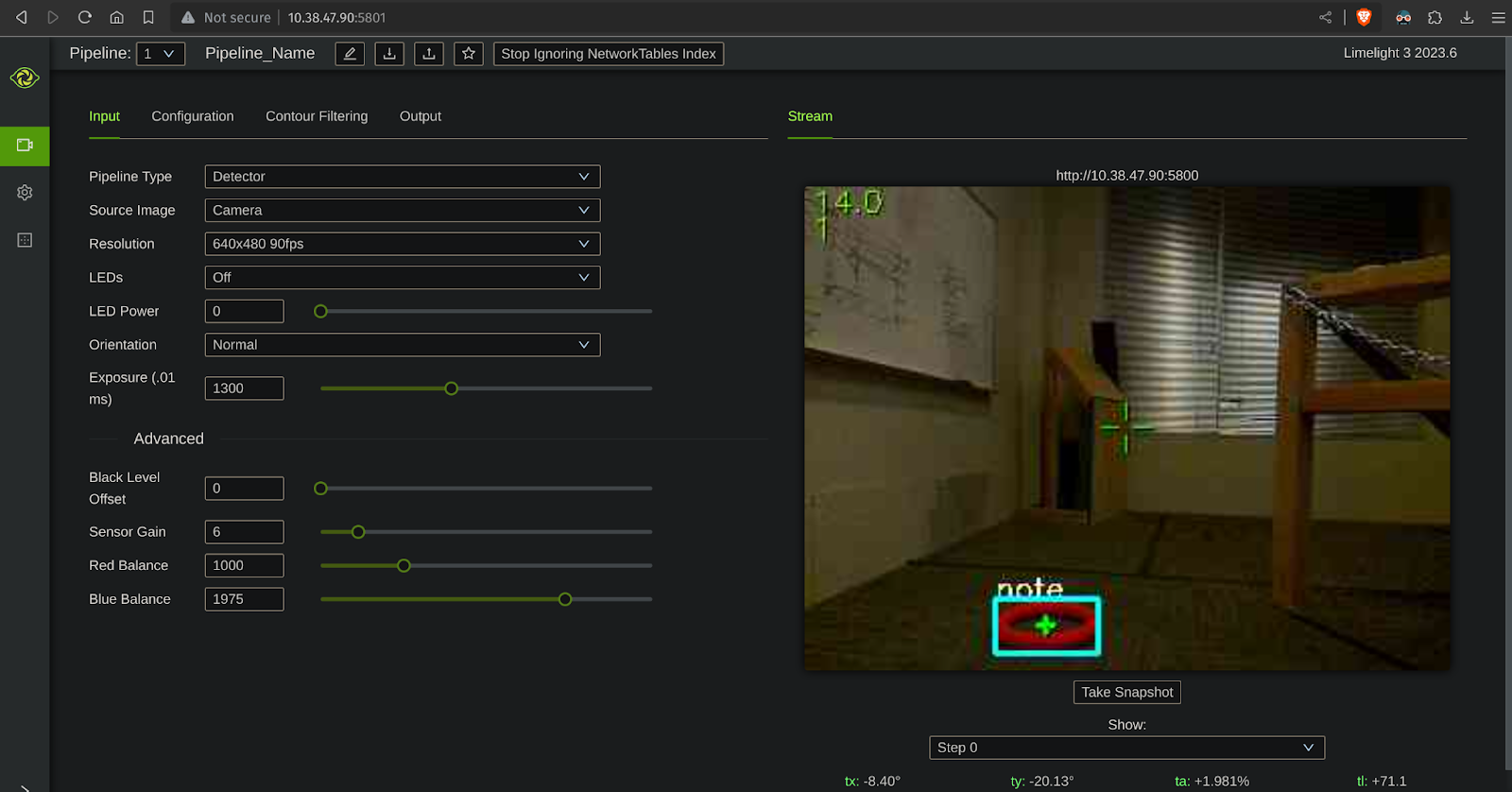
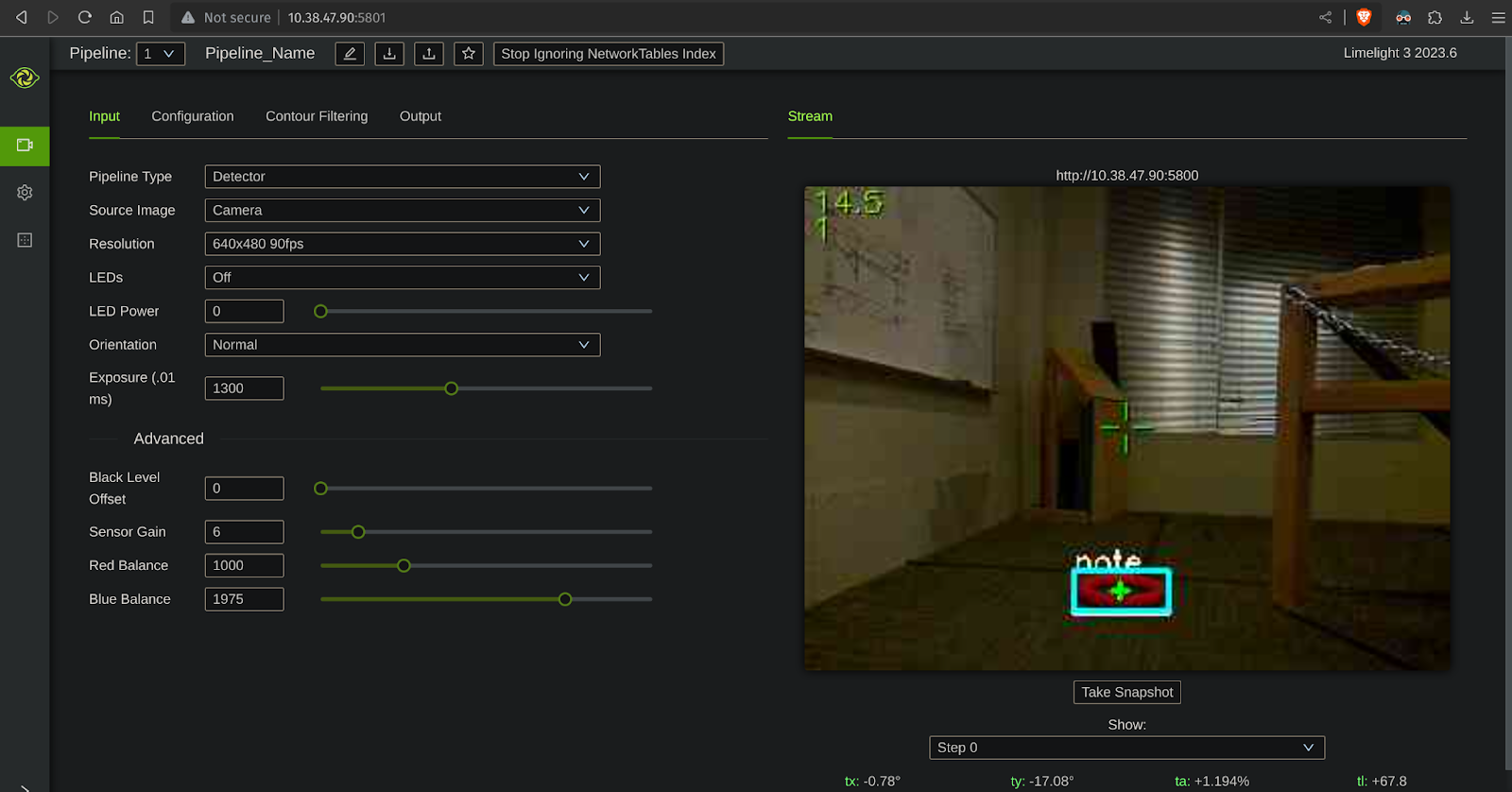
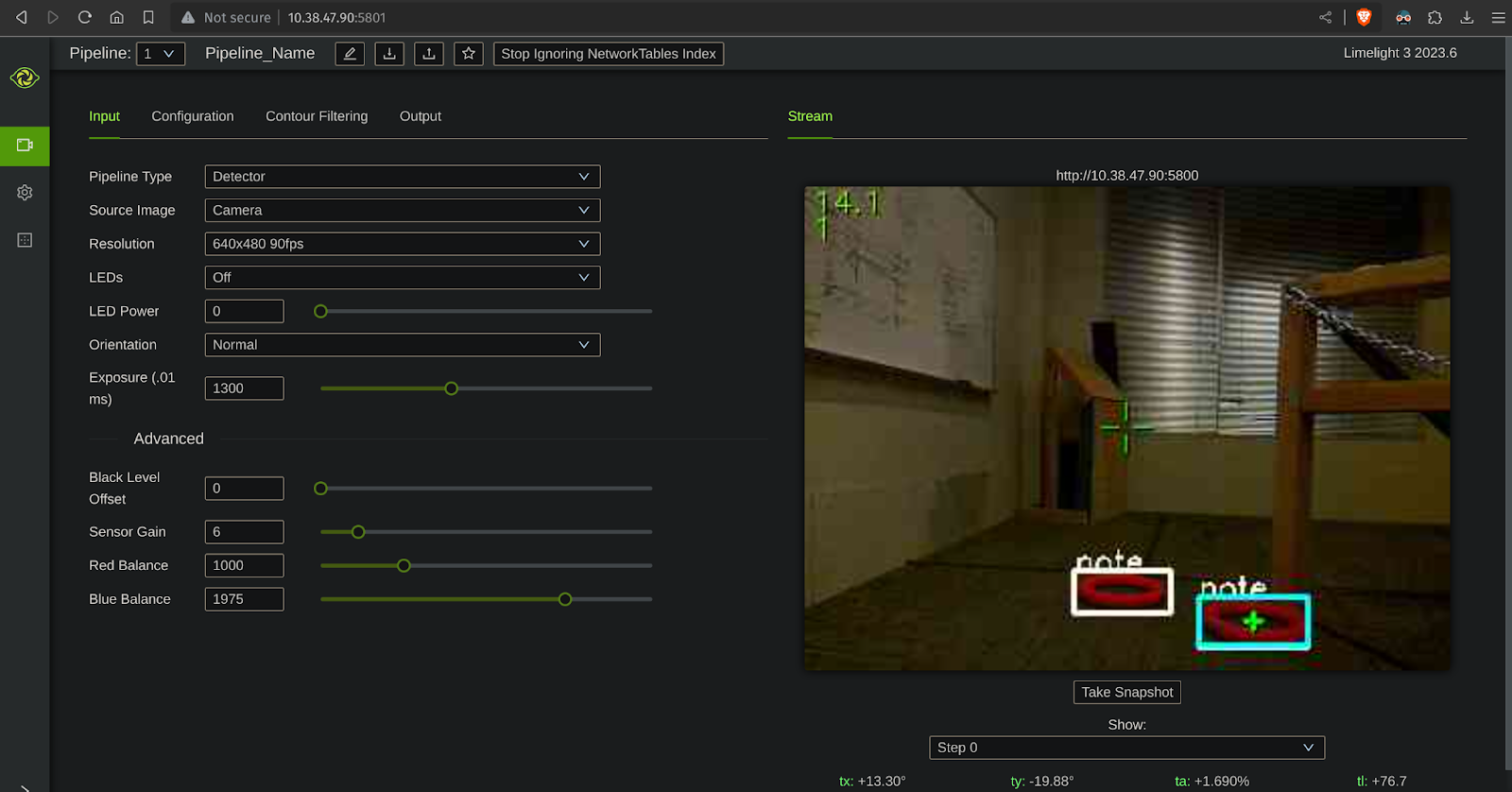
Object Detection
Inspired by the post by Andrew Schreiber, we were able to produce what we believe to be the first note detector model running on a limelight (Google Drive link w/.txt file). This model was trained off the amazing data provided by Andrew Schreiber and averages around 14 fps on a Limelight 3 (compared to the 80 fps we achieved last year from Limelight’s Cone and Cube detection model). We were able to do some research and found that the Limelight currently supports efficientdet_lite0 and trained it with Google Collab (we did try using a yolov8n model only to realize that it wasn’t supported by the Limelight). If anyone is interested in training their own model for this season please feel free to use our Google Colab notebook as a guide.
Photos:
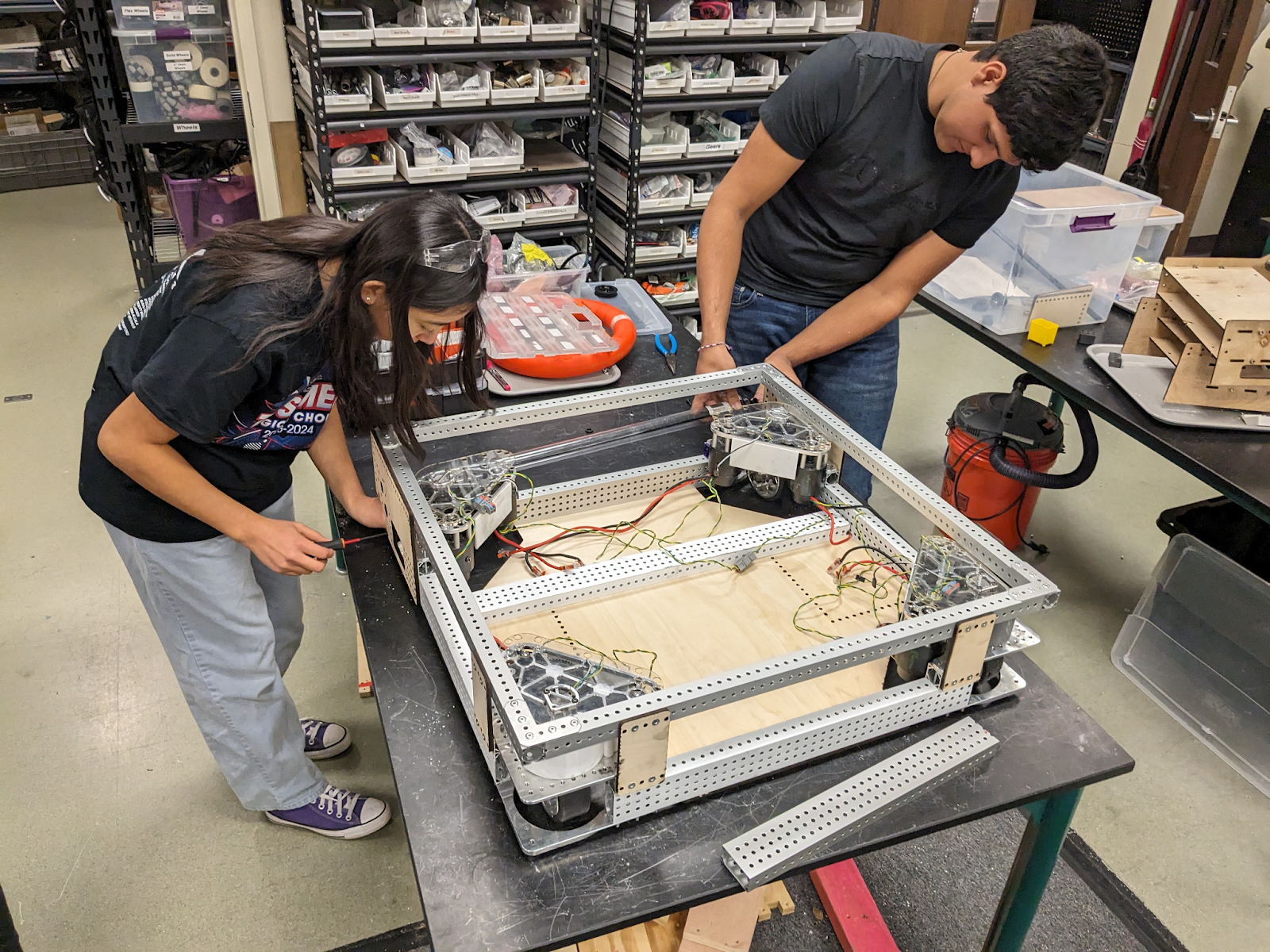
Alpha/Prototype Chassis
We begin construction on an alpha/prototype robot that will allow us to test our concepts and design path and find ways to improve it as we design and build the competition robot. The swerve modules are from an old robot, and the rev tube plus our laser cutter make manufacturing mechanisms very quick. Normally we’d want to do this on an already built chassis, but with the design requirements so different for this robot we decided that building a new chassis was the best way to be able to test and iterate quickly.
Intake Test
We were able to mount version 0 of our intake on the robot with mixed results. The note did go in the robot some of the time so that is a success, but it has a lot of work to do before we are happy with the design. In the process of building this, we had a design mishap that led us to need two 35t 5mm belts that we didn’t have, we were able to print them from Carbon Fiber TPU and run the tests with the printed belts. We also tested using hot glue to hold in our roller hubs on ⅜” rounded hex dead axles.



No comments:
Post a Comment
Note: Only a member of this blog may post a comment.