
Tuesday, February 27, 2024
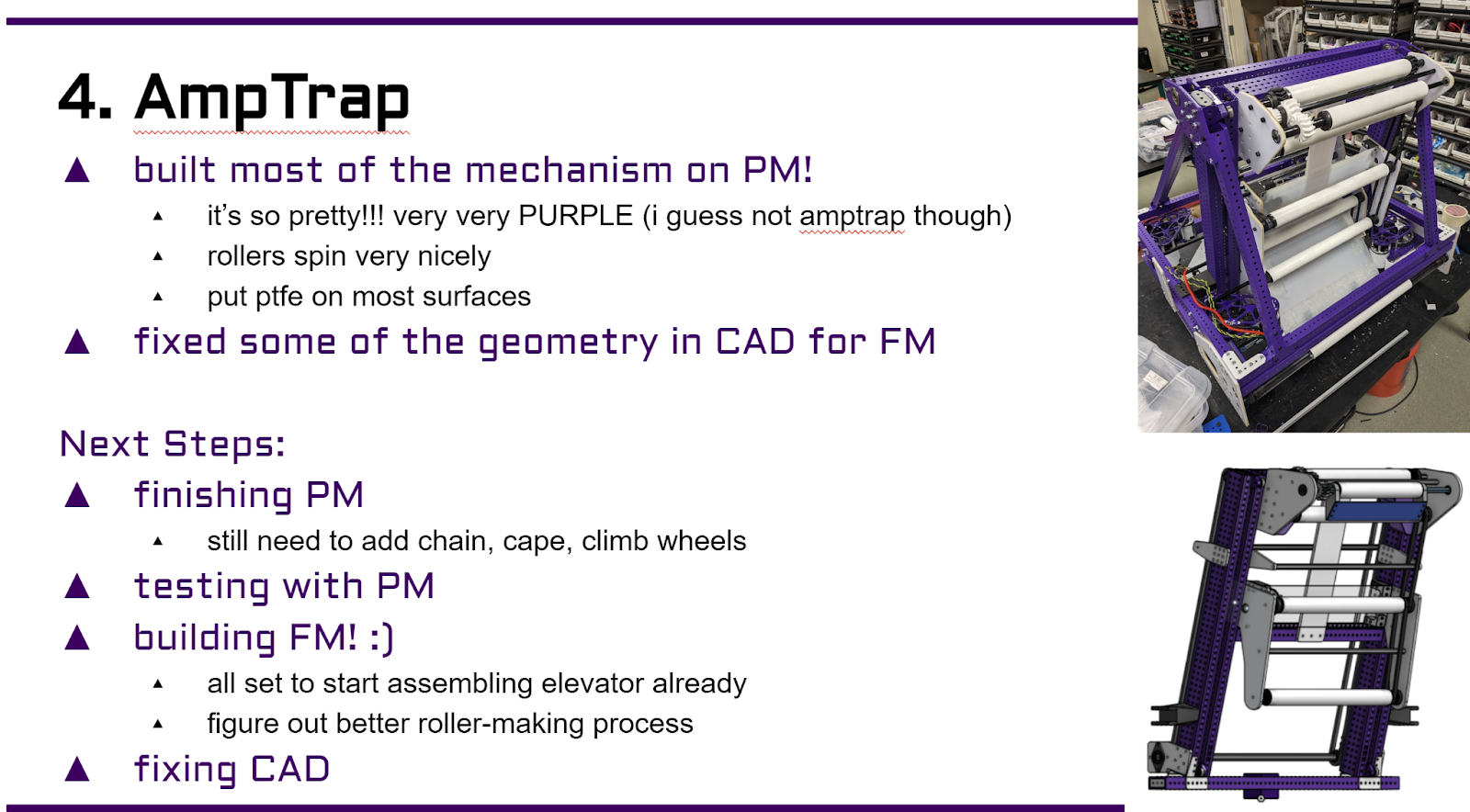
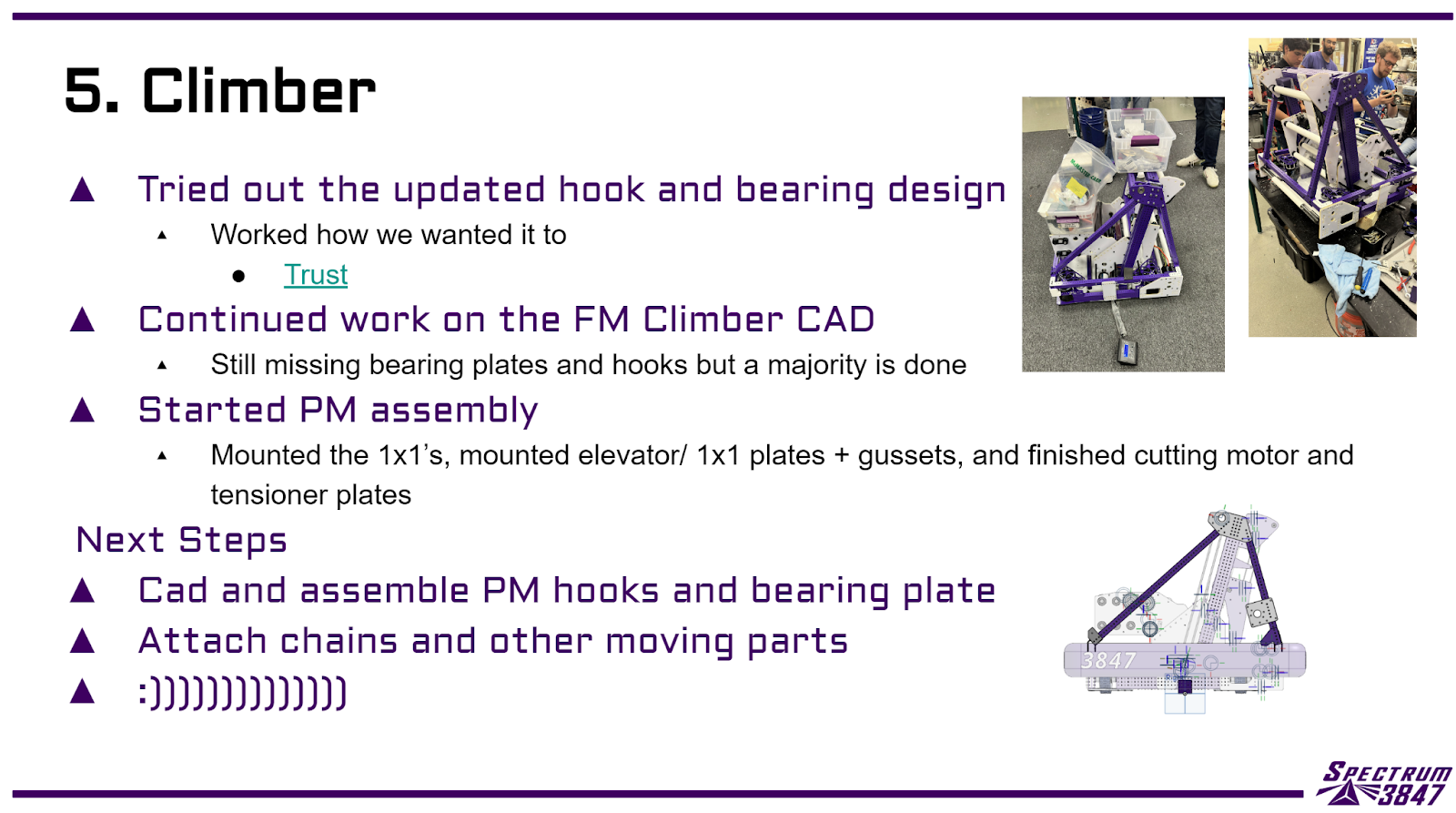
Day 51 & 52: New AmpTrap Concept
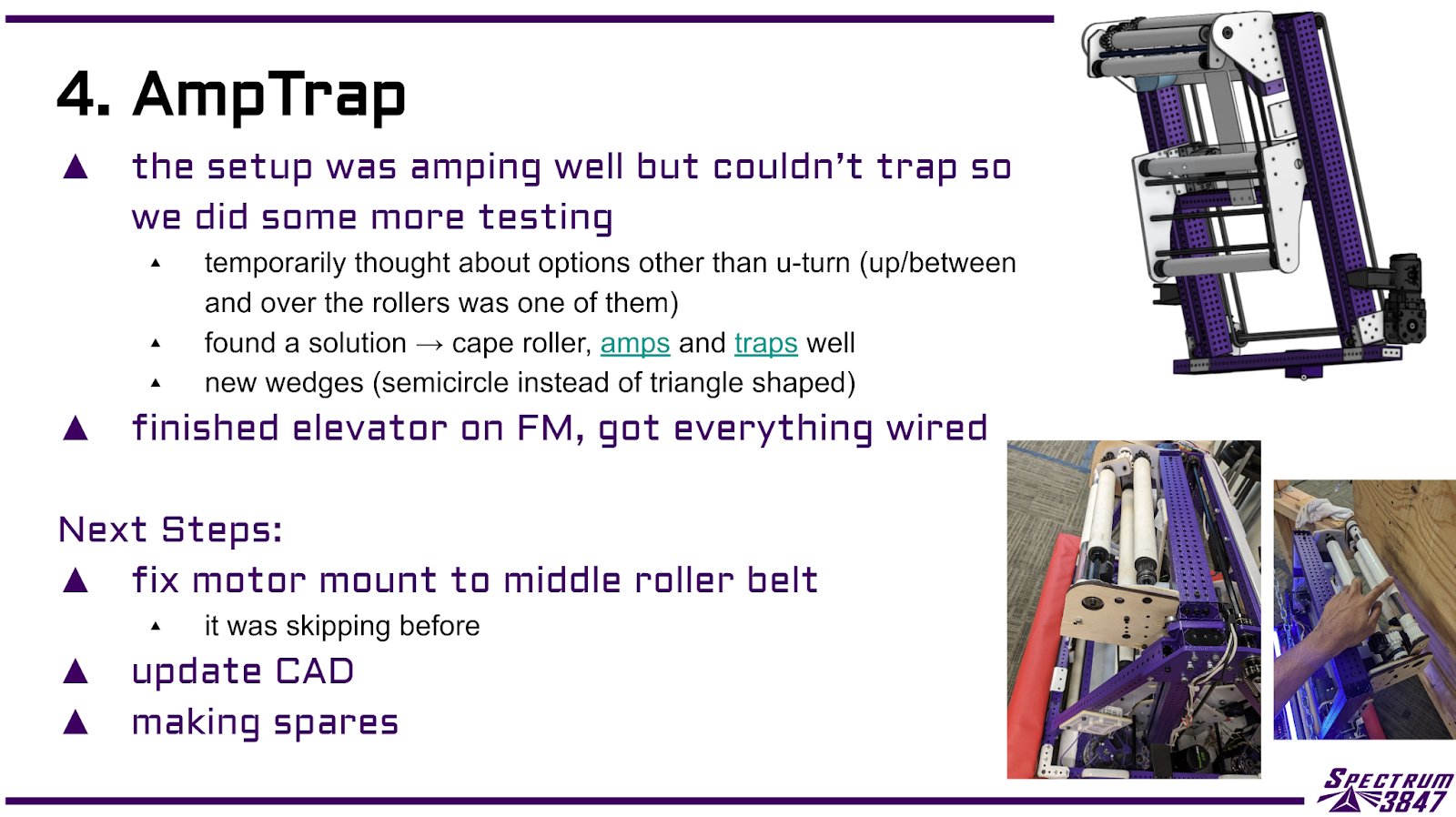
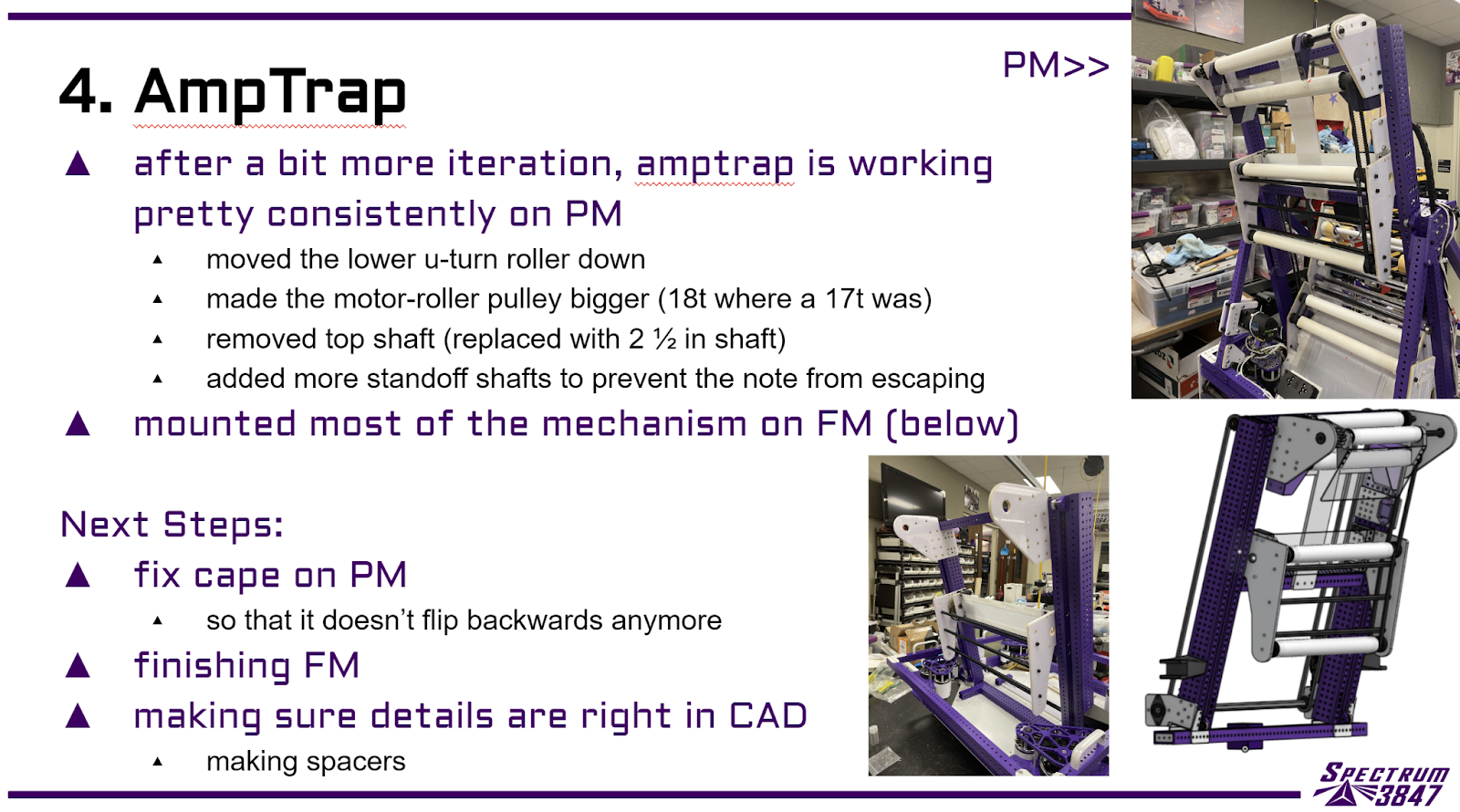
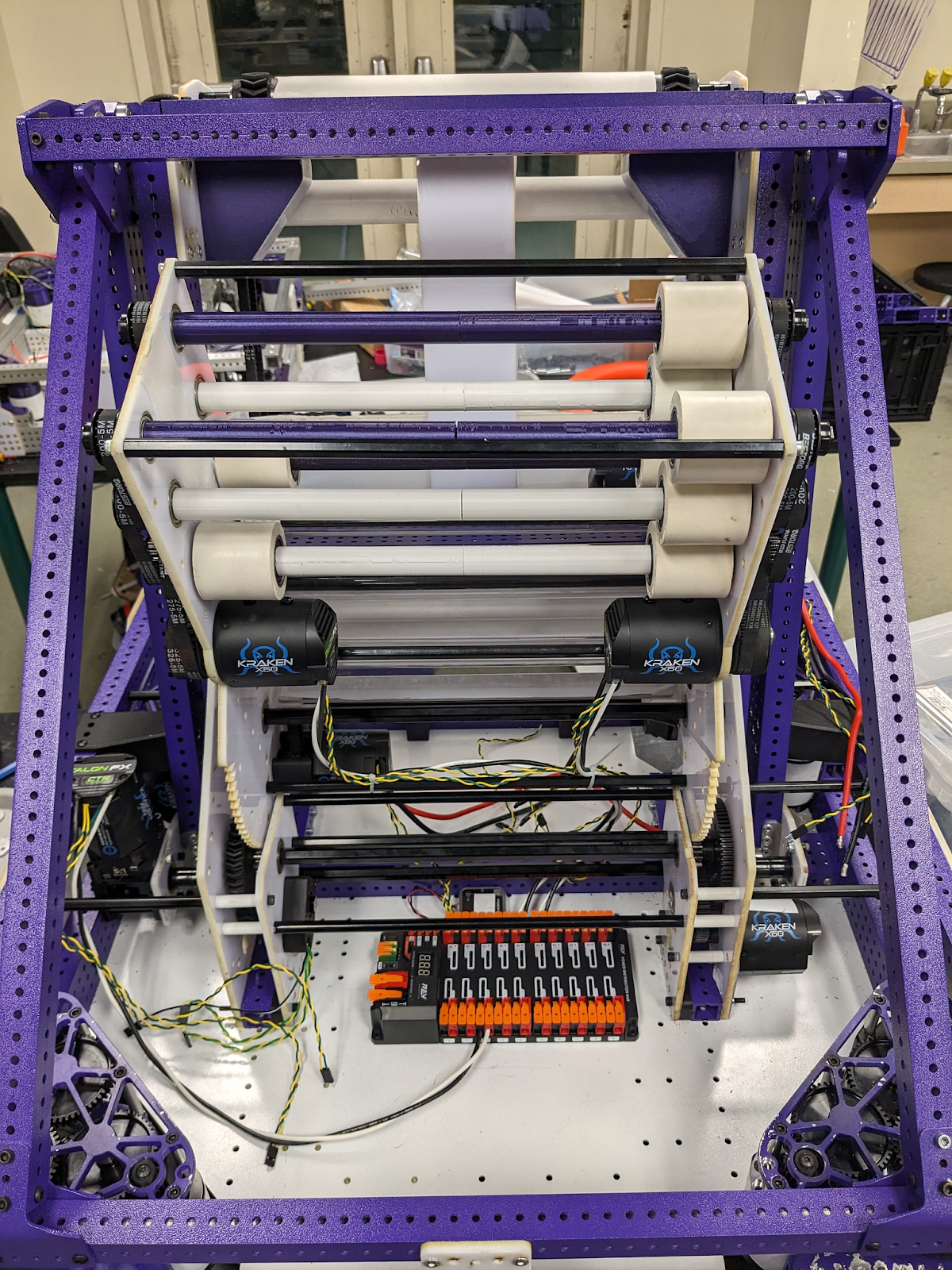
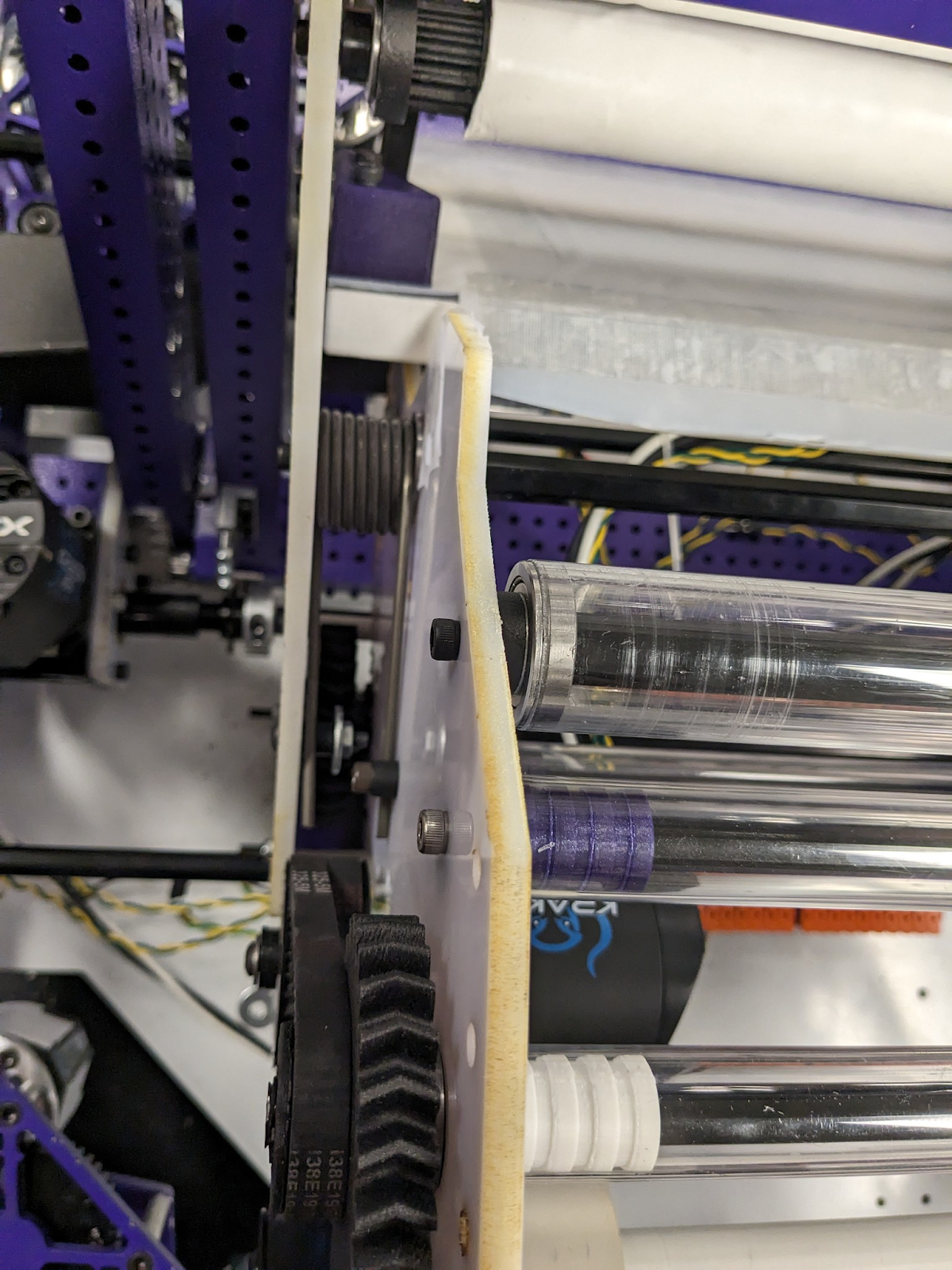
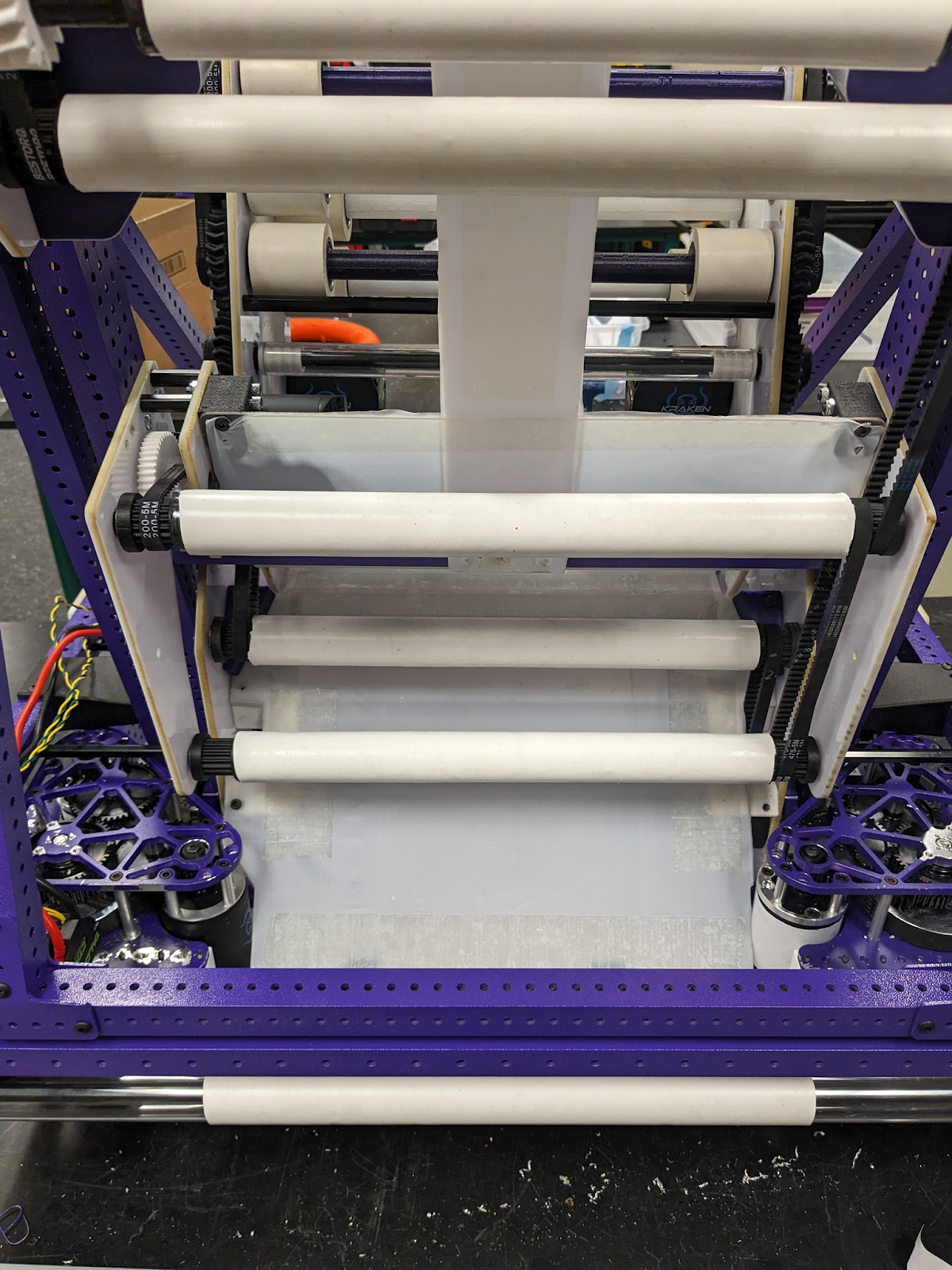
We have been playing around with various ways to improve our trap mechanism while still letting us amp quickly. The new mechanism is basically a powered cape.
Amp Score
Trap Score
This works pretty well and we’ll make a better version this week.
Day 50: Photon Does Things and Intake Reliability Upgrade
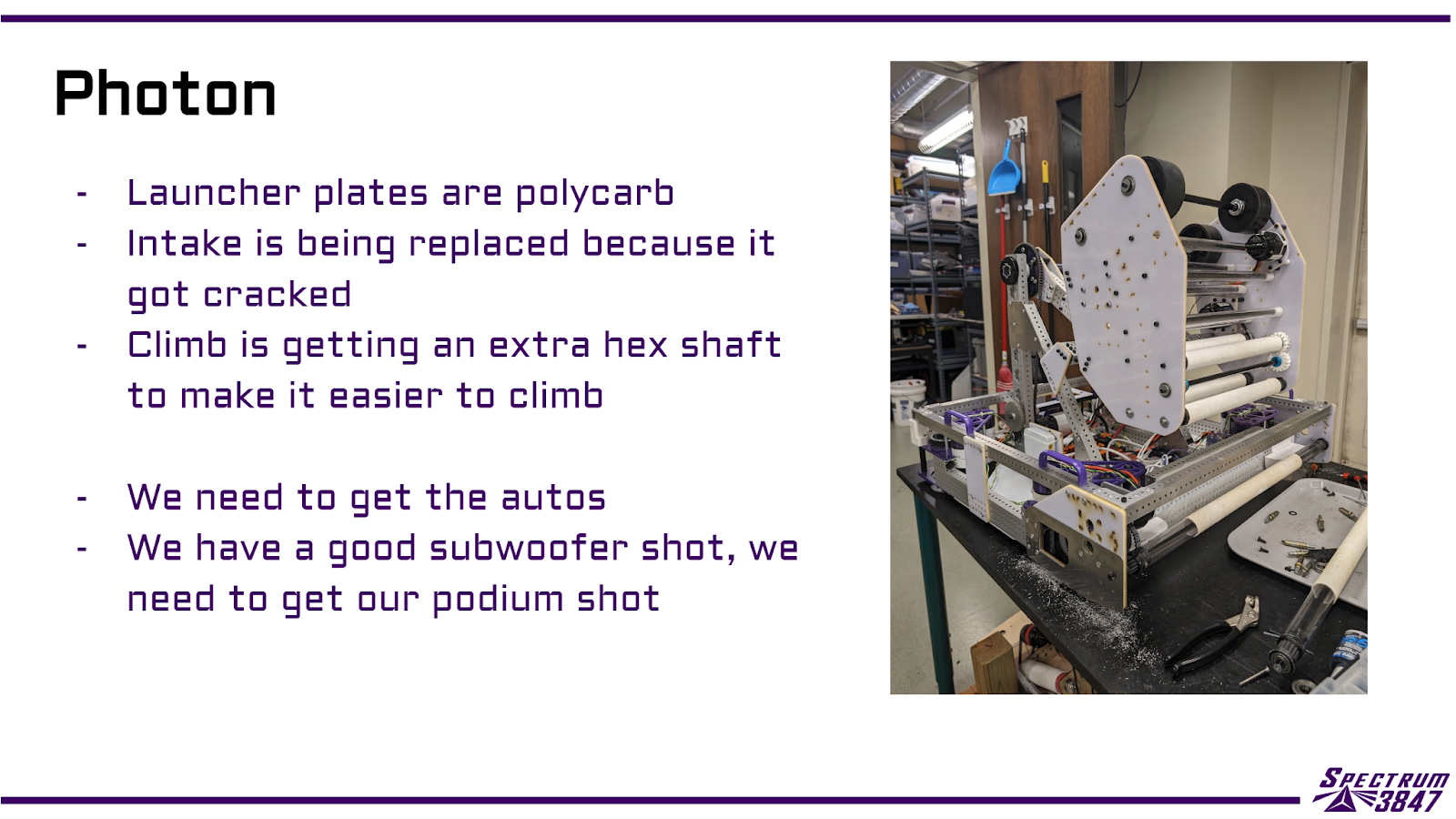
Photon Update
Today we got software set up on Photon to amp, climb and subwoofer. We realized that the original gearing on the arm was too low and that the arm would not be able to support the robot enough to stay up on the chain for 5 seconds. To solve this, we changed the gearing and we were able to stay up after being disabled.
We have plans to get a podium shot and a limelight mounted on the robot before our second district event.
Intake Updates:
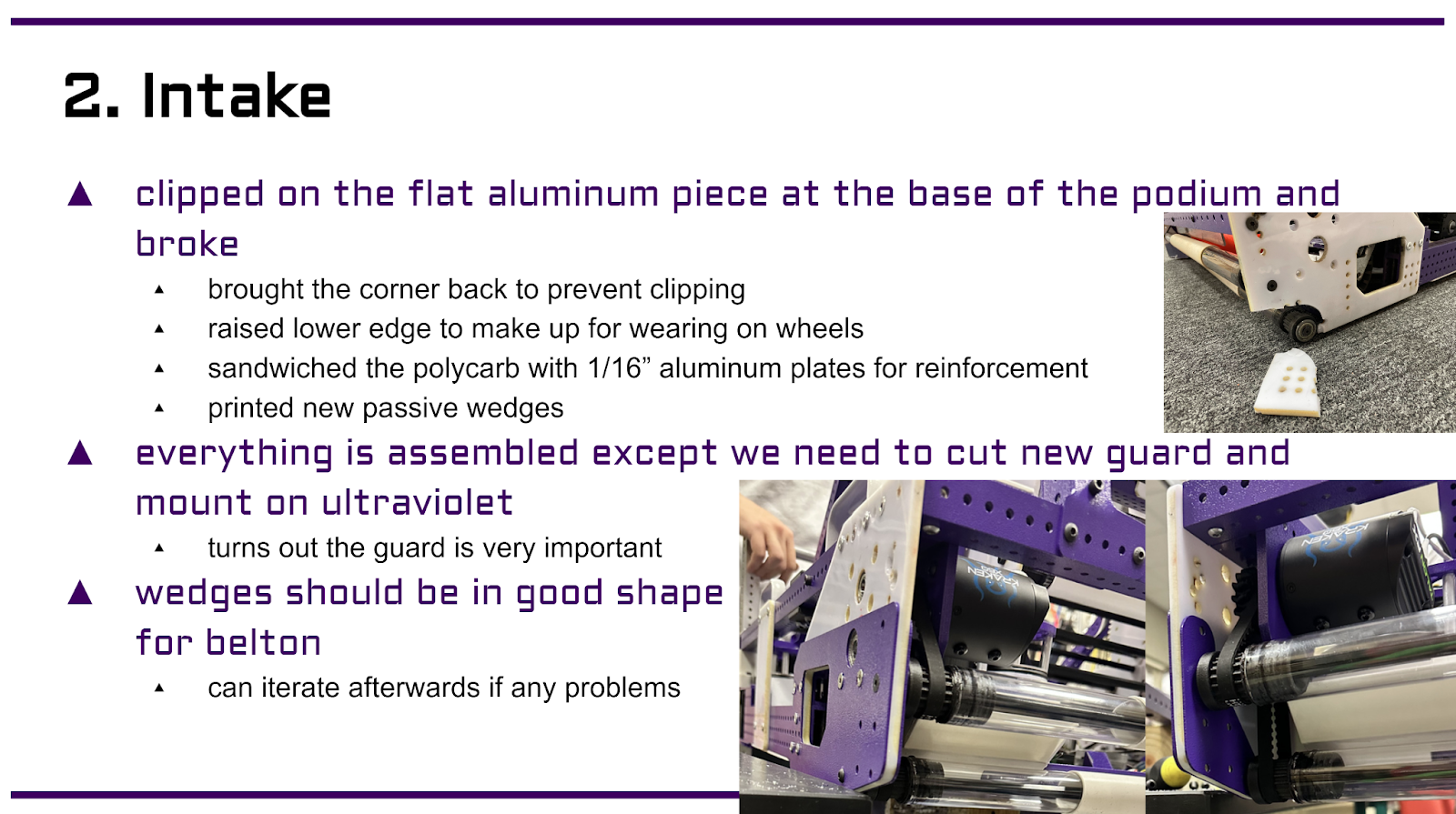
After breaking our Intake yesterday and much discussion, we decided to re-inforce it with 0.090” aluminum and raise the leading edge to avoid it hitting the bottom of the truss.
Day 47, 48, & 49: Driver Practice & Photon Update
Full Field Driver Practice
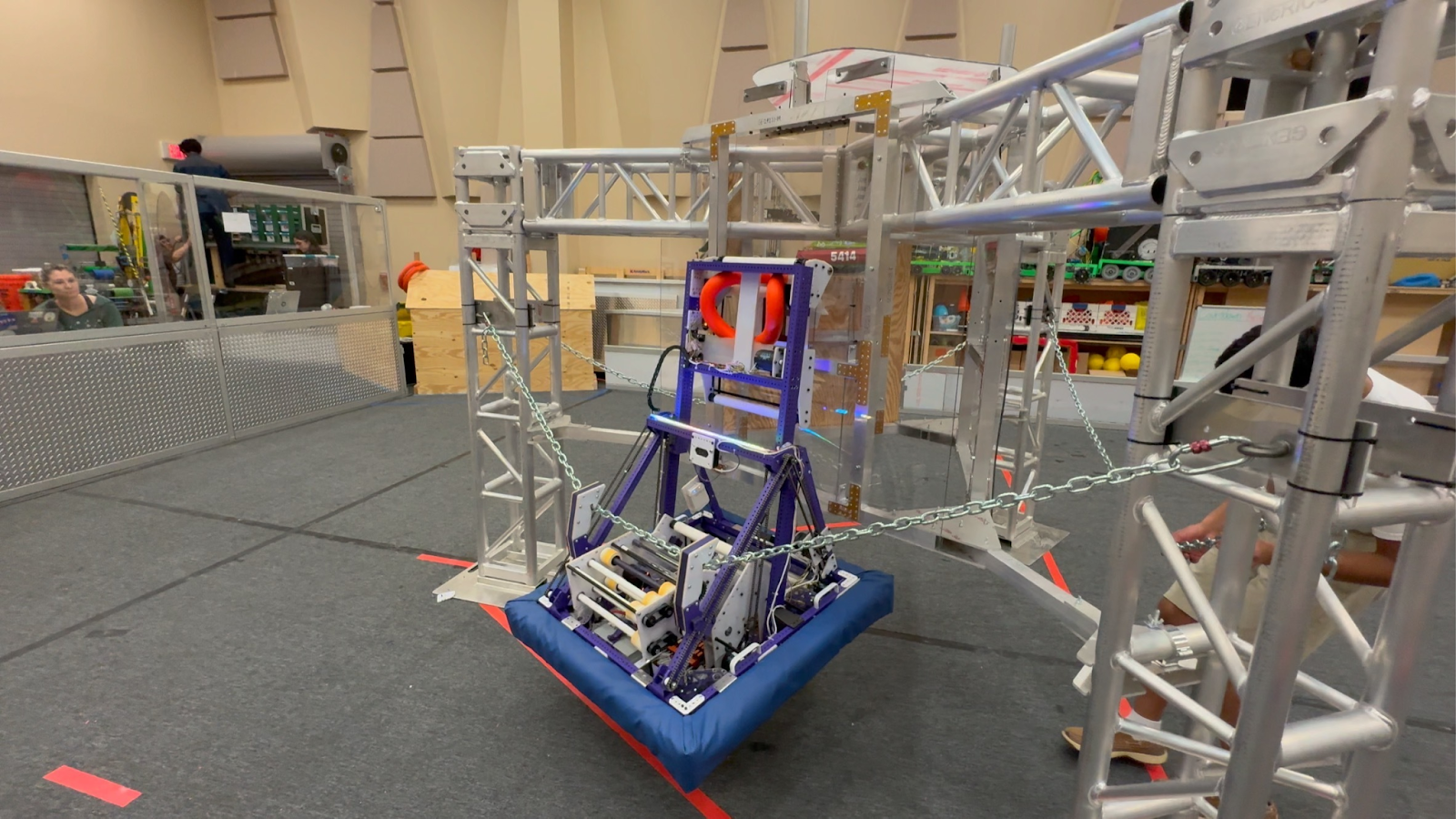
Today we visited our friends at Pearadox #5414 and did some driver practice on their full sized field. Here is a clip from driver practice.
Unedited full footage can be found in our photo gallery. We were able to consistently run two amp cycles, one speaker, and then another speaker within ten seconds of the first one (within amplification time.) We don’t yet have Apriltag aiming, so we were only subwoofer-ing during these countdowns. Cycles will get faster with auto aim to both amp and speaker.
Failures
Ramp from intake scraped off, caused by scraping the thin rectangle of aluminum of the real stage, when rotating to shoot a podium shot. We did not put it back on the robot.

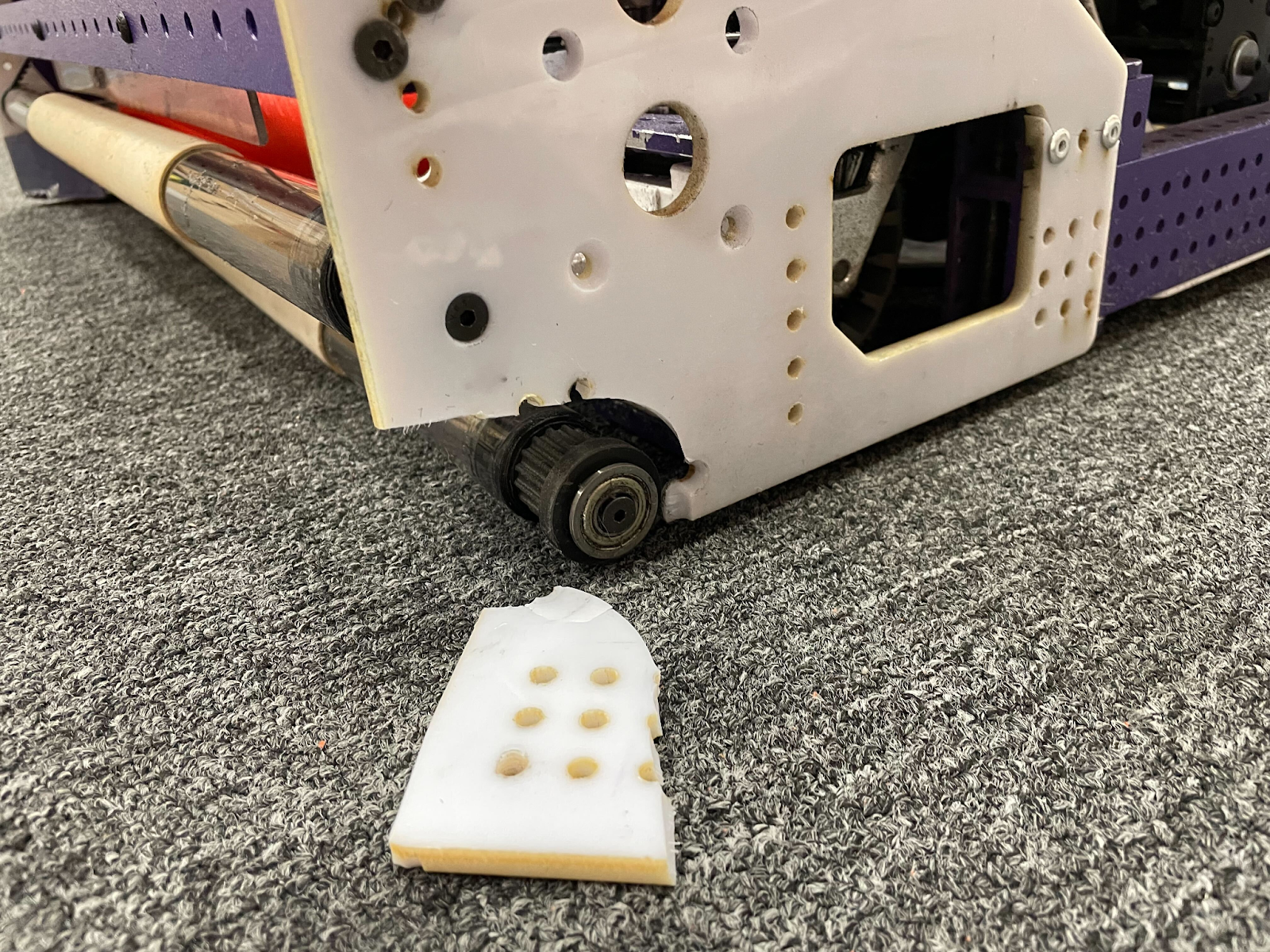
Intake plate broke and the launcher pivot was able to pop out on one side. Caused by hitting the same truss as before. It was a pretty medium strength hit. The broken intake could still intake/eject, but it was scary because the lower roller could also get sucked under the robot.
Pearadox has a real stage! Unfortunately, our trap attempts were unsuccessful. Climbing was good, but the amp/trap mechanism needs modification to ensure the belt doesn’t skip, and that the note stays in contact with two rollers at all times. Otherwise, it looks promising.

Intaking multiple game pieces at once. It was easy to intake multiple game pieces at once at a source with lots of notes around. Intaking multiple notes could damage the notes and get them stuck inside the robot. We don’t yet have a camera facing the intake, so we just had to guess and check.
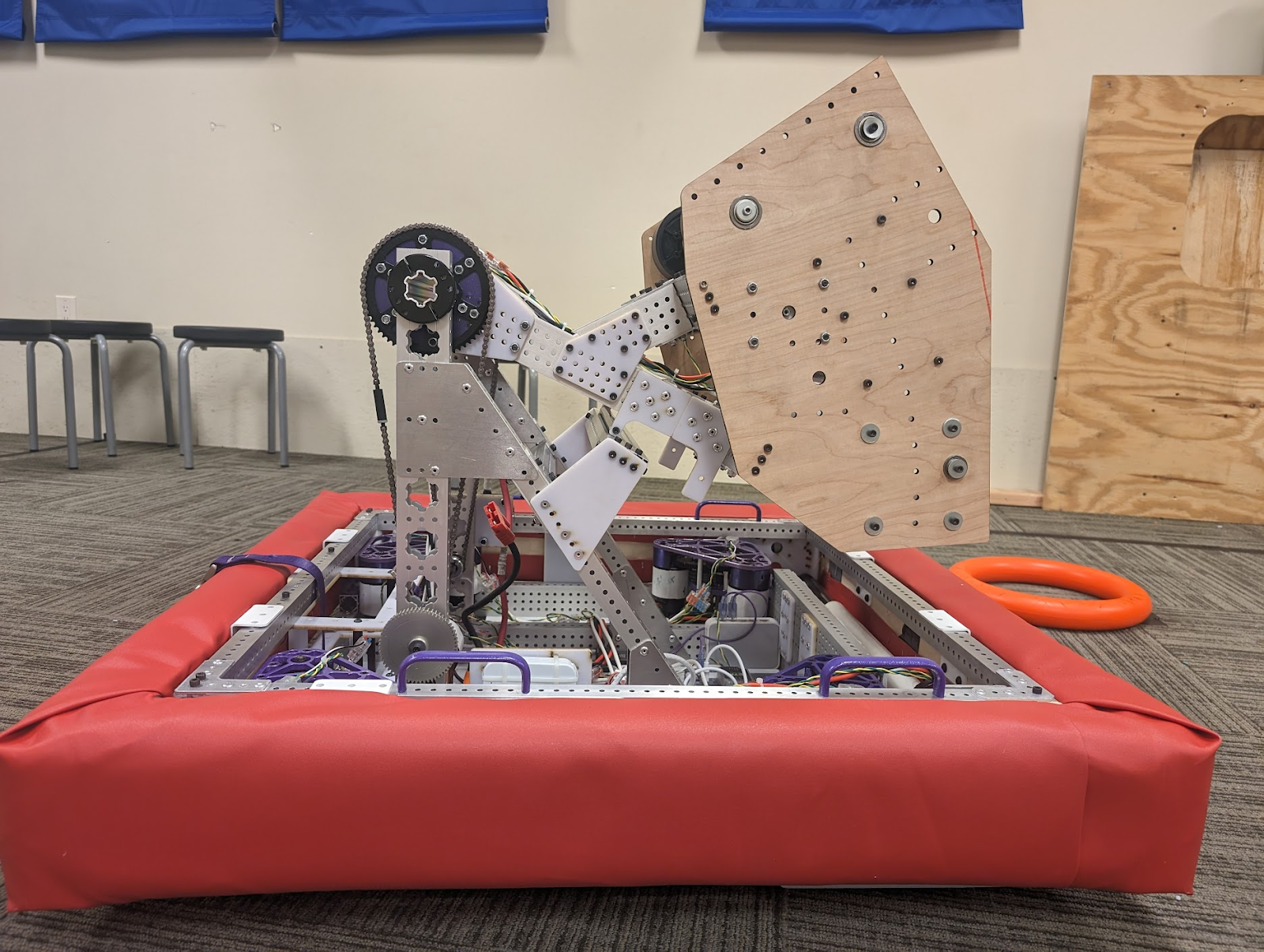
Photon Update
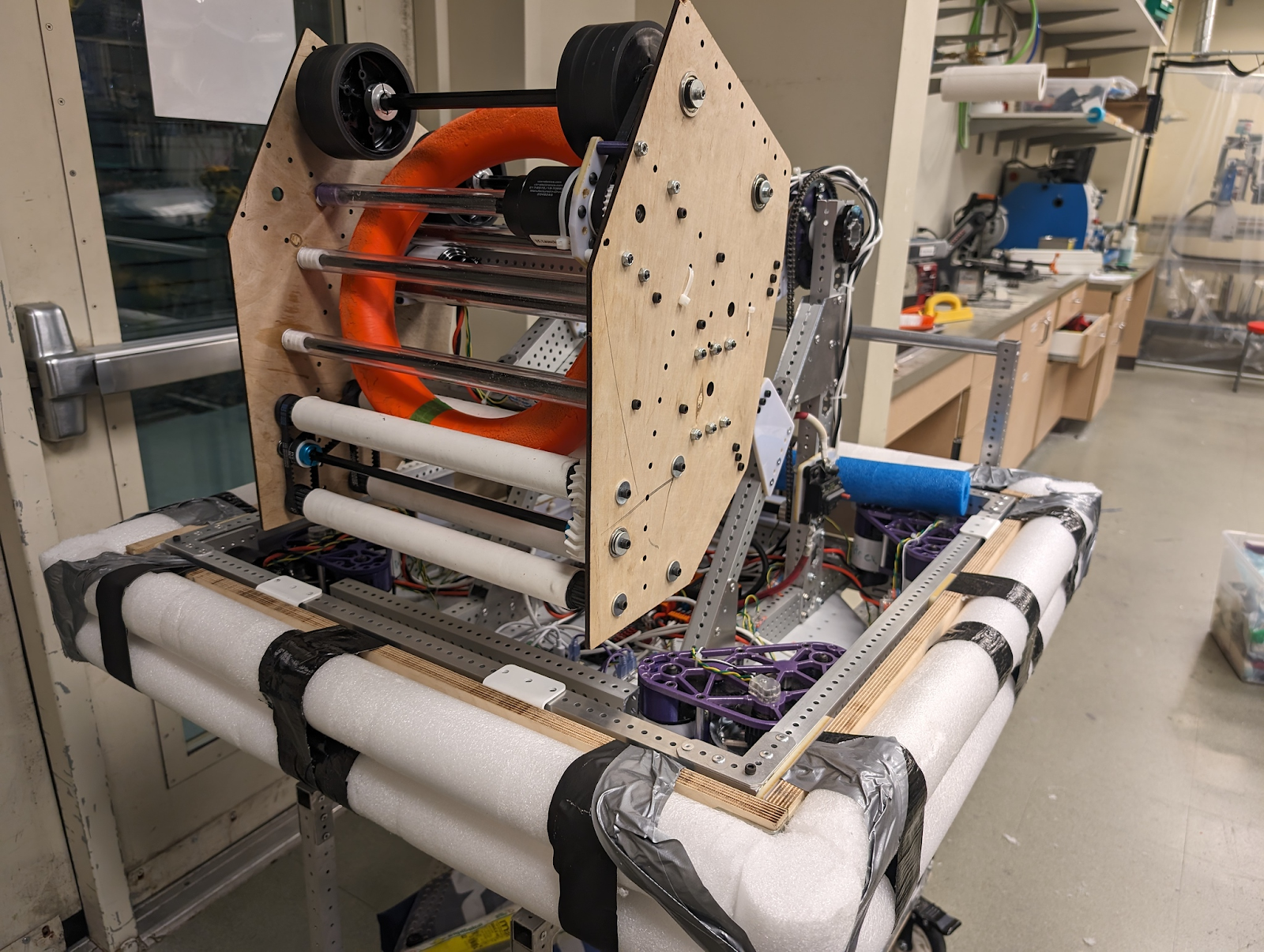
Photon is getting ready for our first event in five days! We are trying to get the robot ready to practice at Pearadox this weekend on Sunday which we will probably be running the wooden launcher plates to make sure it will work for the Katy District event we will be competing at.
We got our robot running to test our launcher shots and see if we could actually amp well. Our launcher angle was too low, so we need to make changes to make sure our angle is higher to make subwoofer shots in our default position.
We still need to design the climber which will be attached to our arm which will also help get our launch angle higher because it’ll hit our hardstop first. We’re almost done making both bumpers to be ready for our event soon.

Tuesday, February 20, 2024


Day 43 & 44: PM Driver Practice
We have some uncut driver practice videos up on our gallery. We have limited space so we are only working in a half field. The robot is still missing most of it’s automation so everything we ran today was fully manual with only motor sensors running. Over the next few days, we’ll work on getting aiming and sensors on the robot + the climb.
More Here: https://photos.spectrum3847.org/2024-FRC/Build-Season/Week-6-2024
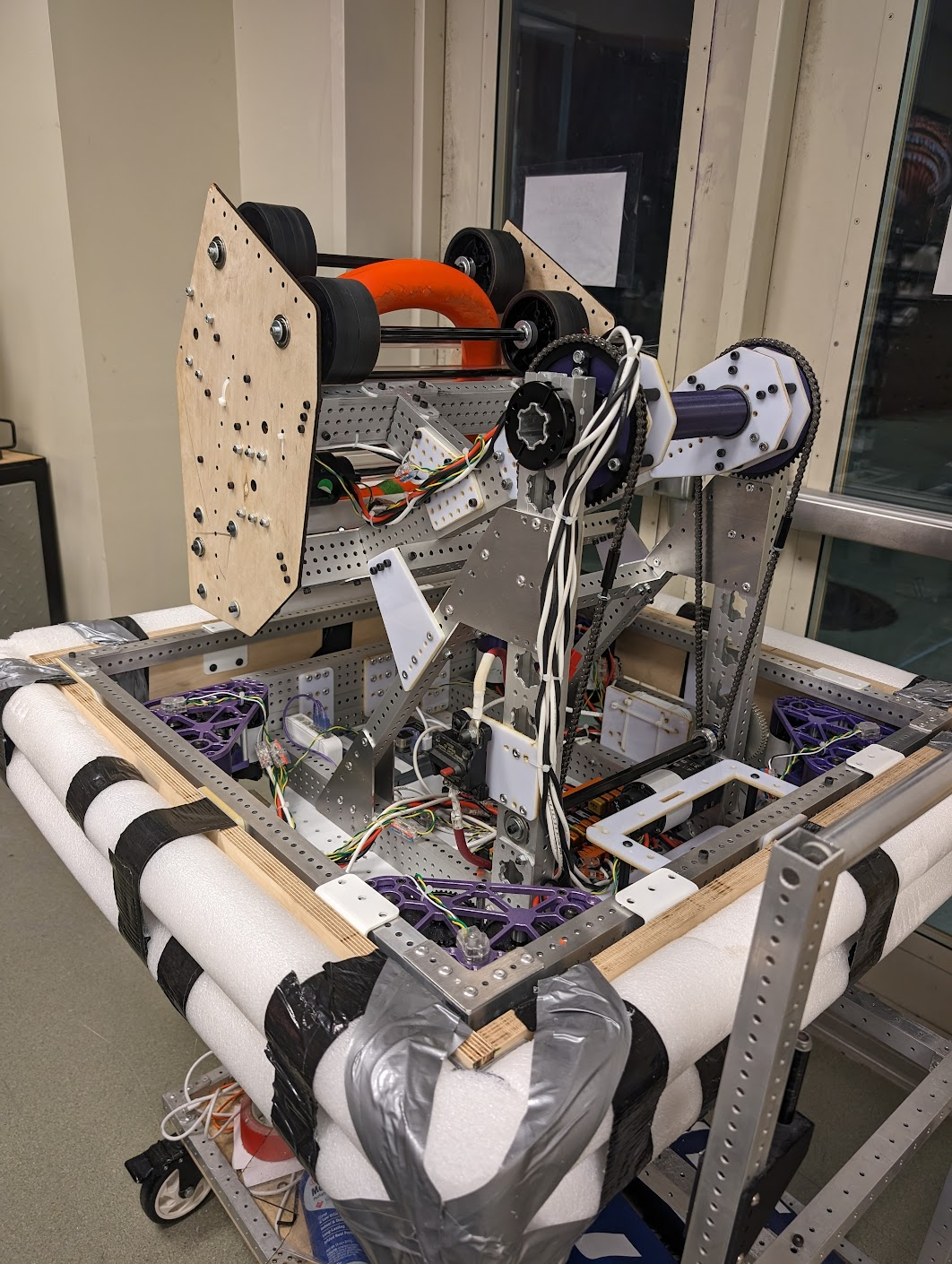
Day 42: PM Running
Over the past few days, we were able to get PM fully assembled (minus climb, and laserCANs), and wired. We also made our first set of bumpers of the year (4 more sets to go FM and Photon).
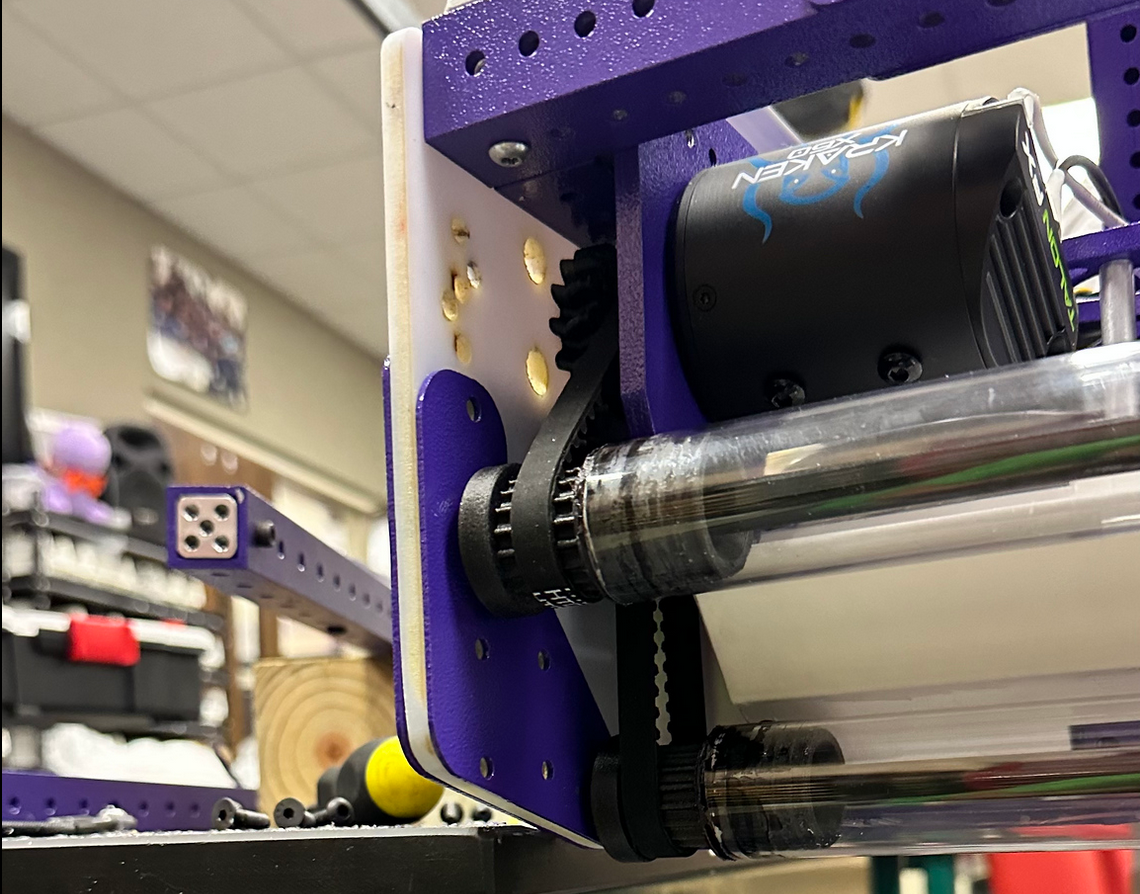
We noticed our launcher was pulling a lot of current even though this was built better than alpha. Each motor was drawing 50A at full power. After some tweaking, we removed the redundant belts to remove drag from the system and got the current down to 30A per motor. Still have some more changes to go before we are happy with it.
Day 40 & 41: Photon Update
We were able to get a little bit more of our Photon 8515 robot completed over the last two days. We have the intake and drive train setup along with the arm. Over the long weekend, we will be working on electrical and manufacturing of the feeder and launcher system.
Tuesday, February 13, 2024
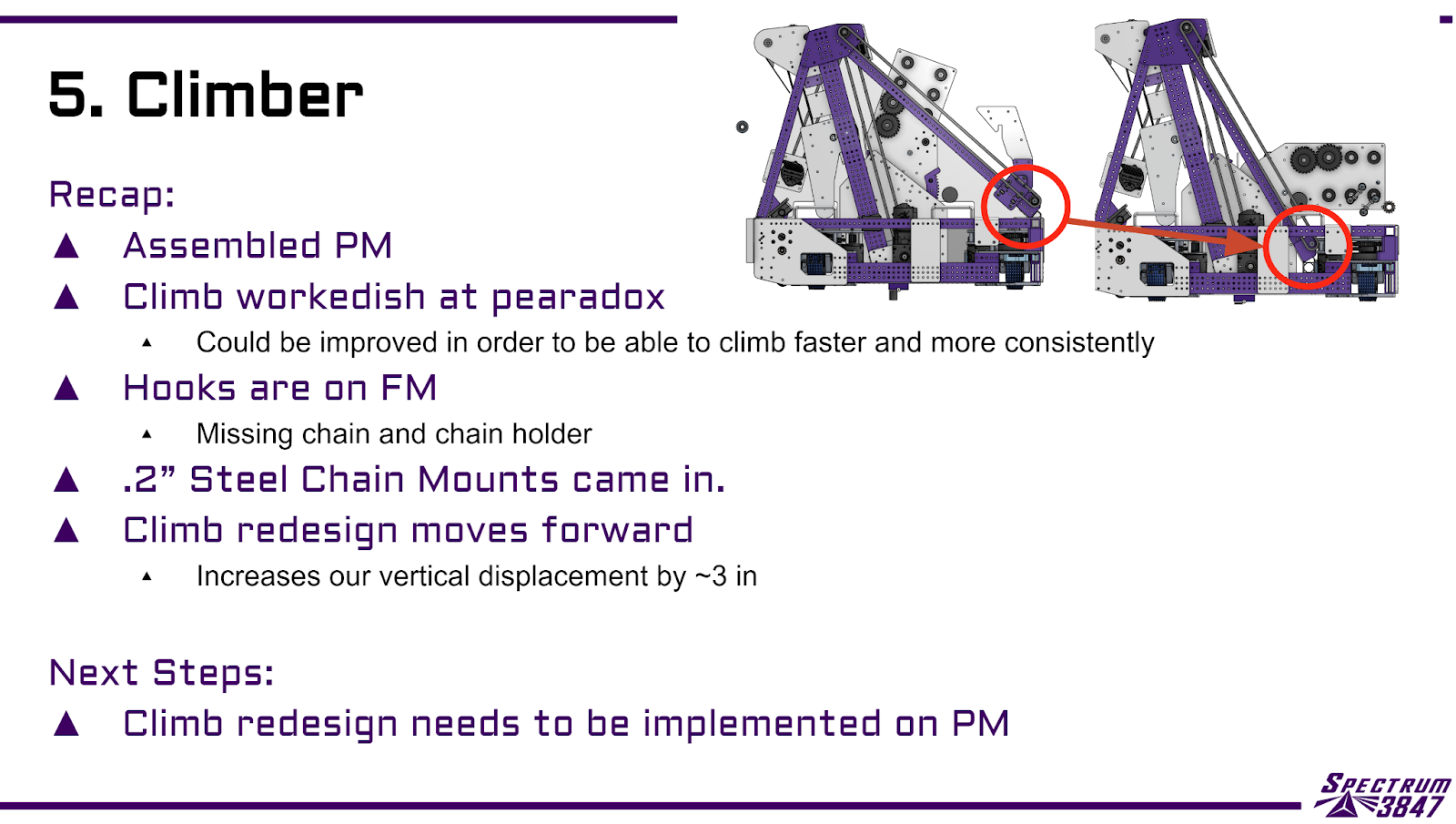
Day 39: Week 6 Design Recap
Day 39: Week 6 Design Recap
PM is nearing completion and should run on Thursday night.
Once PM is running we will quickly manufacture and assemble FM
Much of that can happen over the long weekend. Lots of assembly this weekend.
Auton is in a good place on AM
Drive practice begins soon
Now it’s time to find any and all ways that the robot can break or fail and fix them before competition season.
Also places that maintenance will be annoying and fix those too.
We are basically exactly where we were last year.

Day 38
Day 38: <3
More of PM was assembled today.

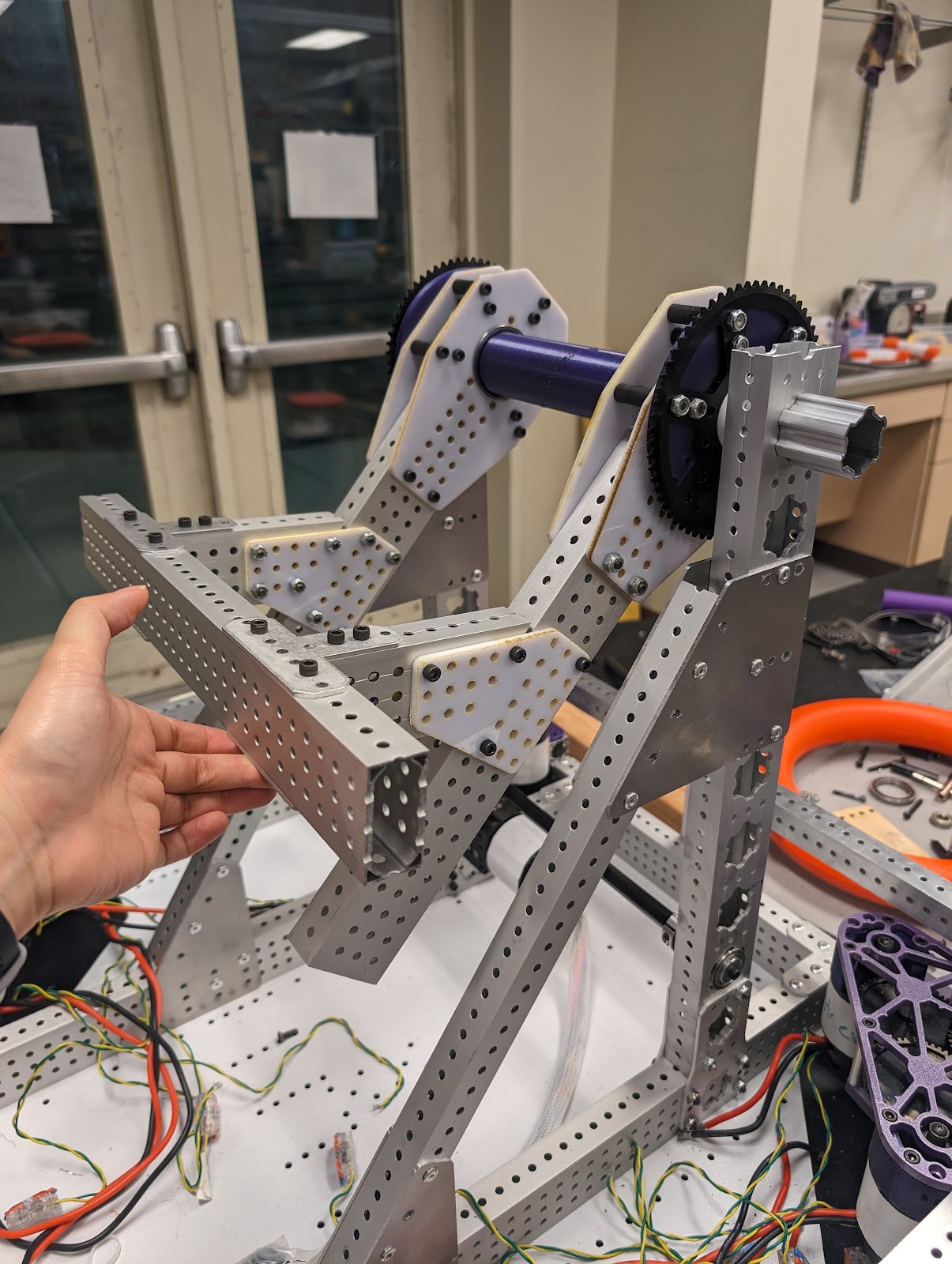
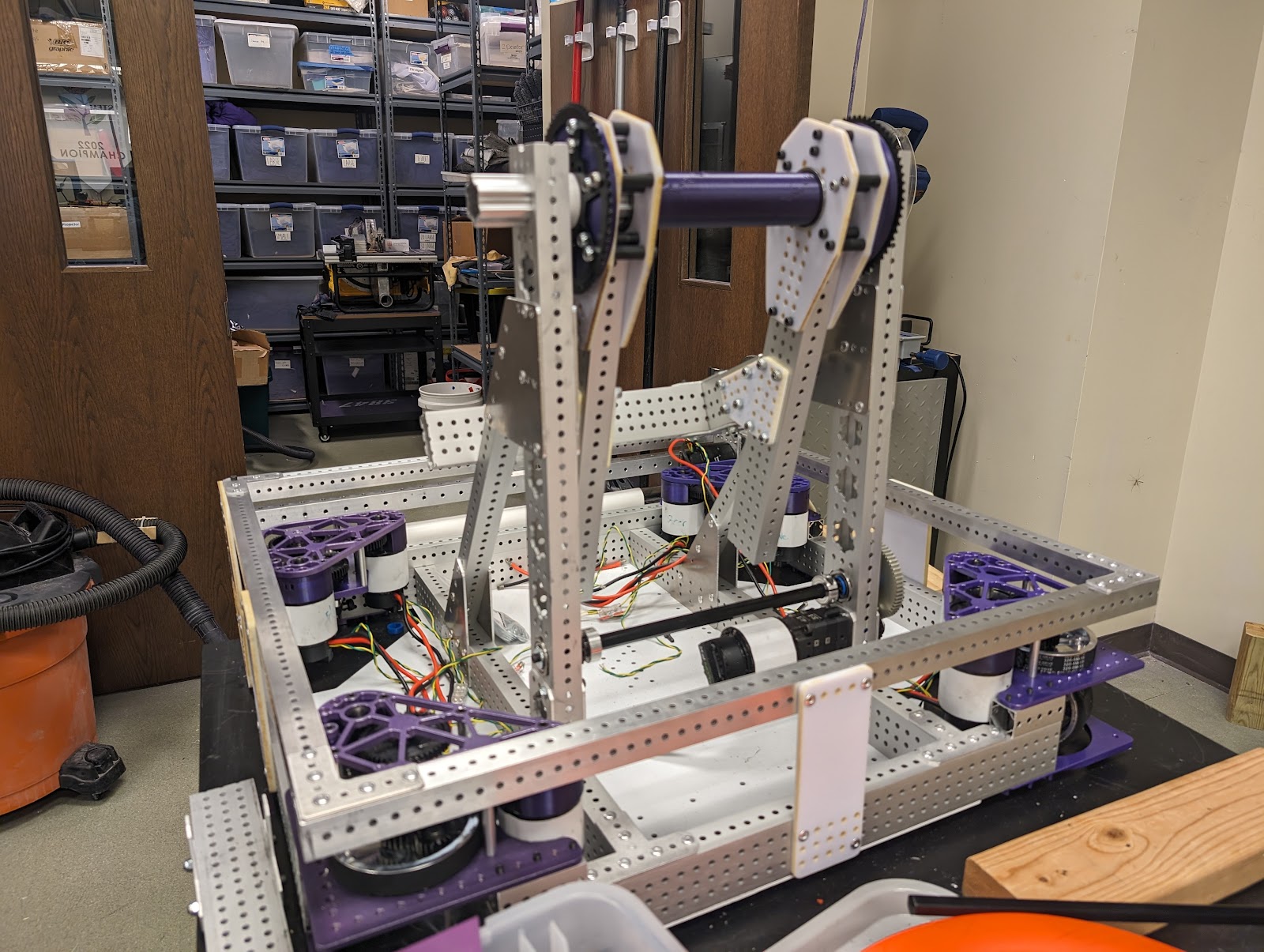
FM Drivetrain
Launcher
The launcher is complete and we added torsion springs to help balance it and remove some backlash. We also shimmed the gears today and removed a good amount of the backlash in the system.
PTFE Film
We put PTFE film on all the flat surfaces the note touches.
Monday, February 12, 2024
Day 37: Auton and PM Assembly
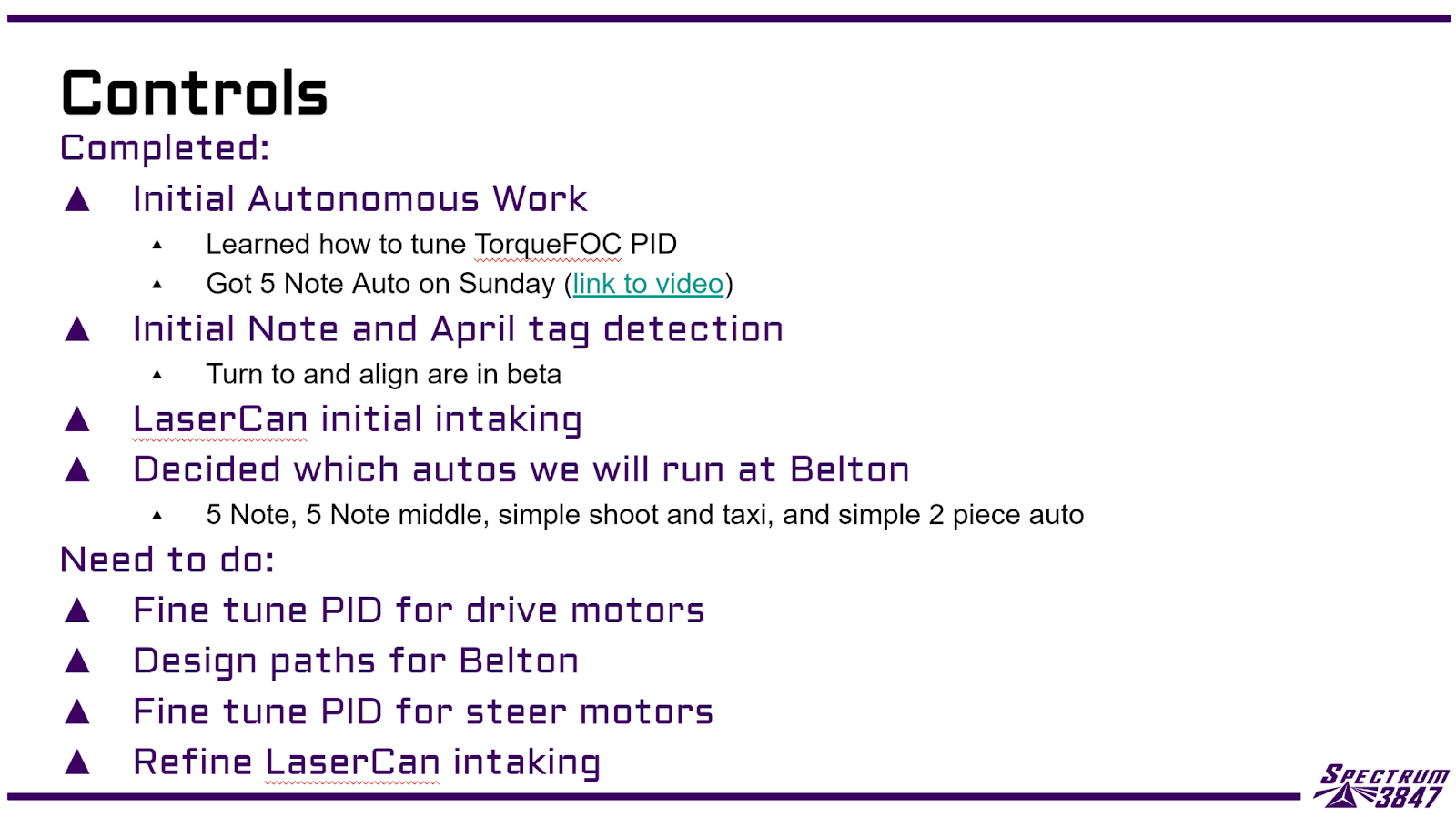
5 Note Auton
We were able to have our controls team work with the Alpha robot over the past few days. They were able to begin tuning in some of our auton paths. We successfully made a few 5-note autos. The launcher tilt on AM is inconsistent so we are most worried about our paths and intaking which is looking great.
https://photos.smugmug.com/2024-FRC/Build-Season/Week-5-2024/i-kRjGbgL/0/1eb89c7c/1920/IMG_5885-1920.mp4
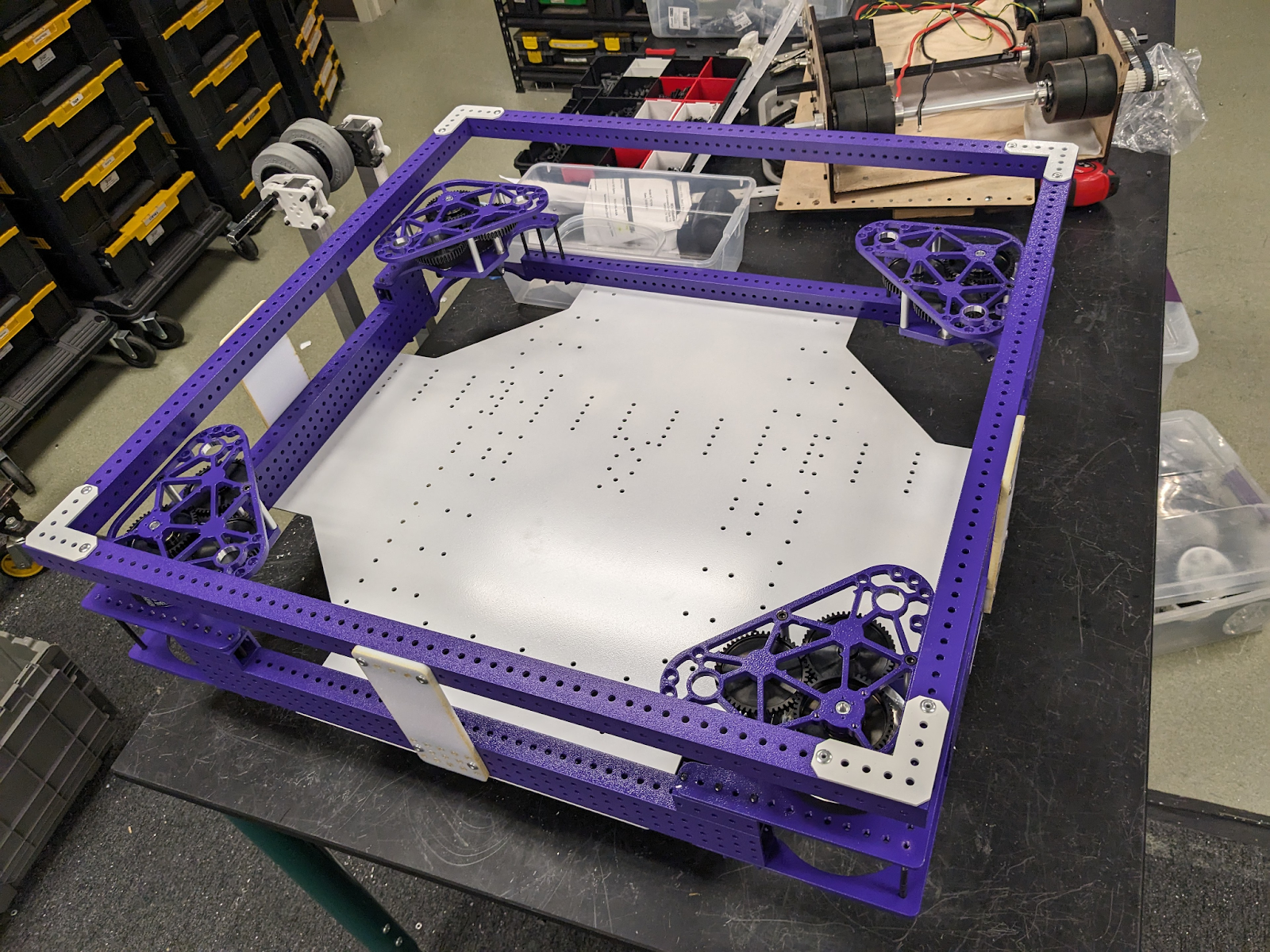
PM Assembly and
We’ve been able to get more of the practice machine assembled. It has all but 4 motors mounted (elevator, climber, and 2 launchers). The intake is fully mounted. The launcher and amptrap mechanisms are nearly complete. Climber still has a little ways to go but that’s always last.
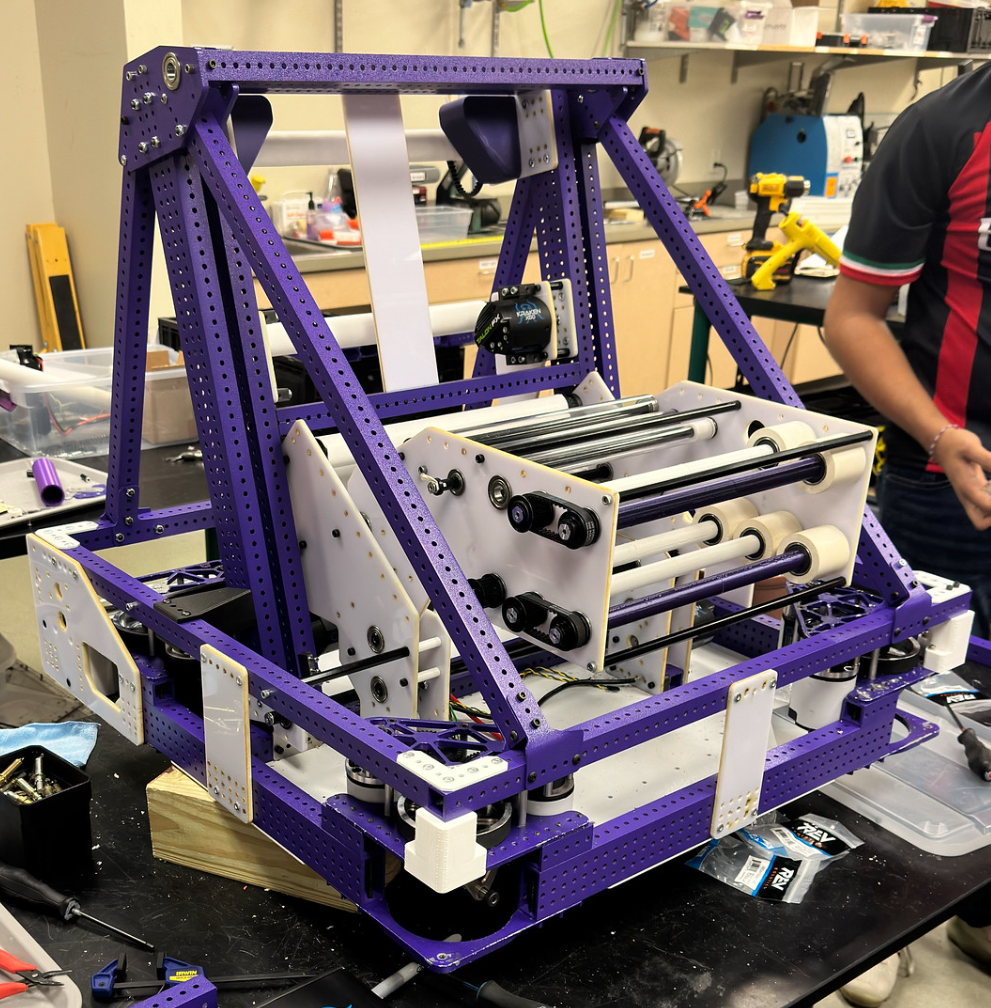
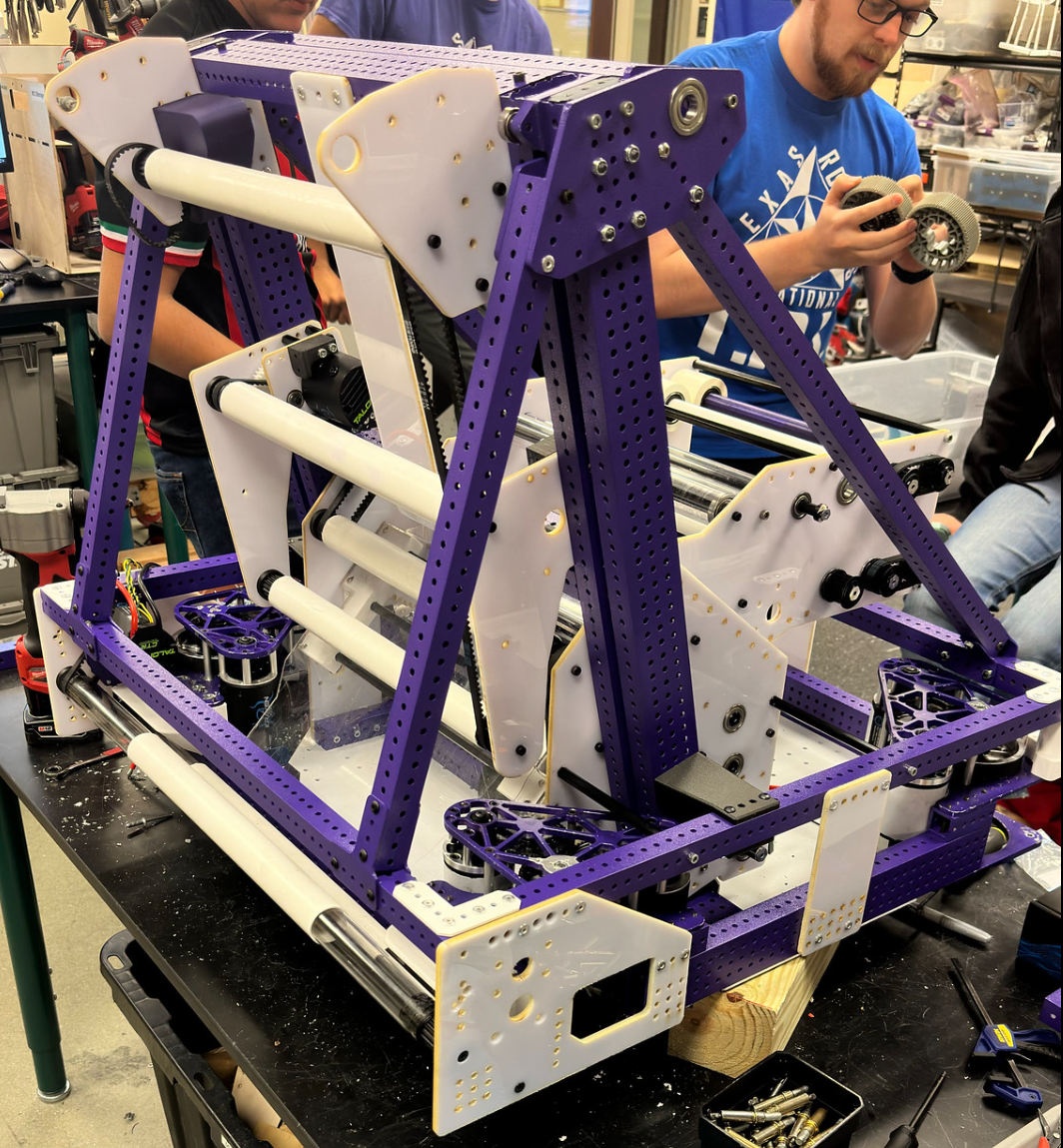
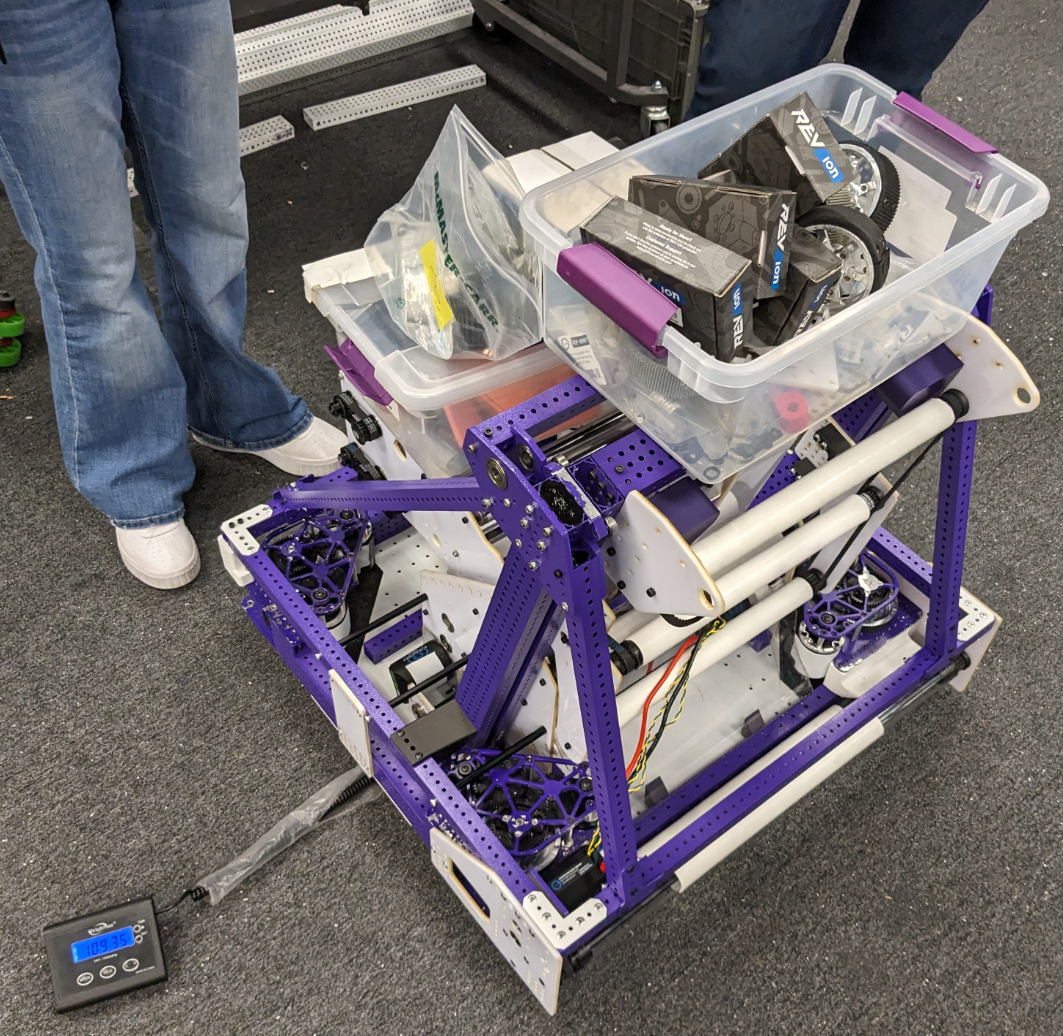
Robot Weight
We weighed PM at the end of the night and got an approximate weight of our competition robot.
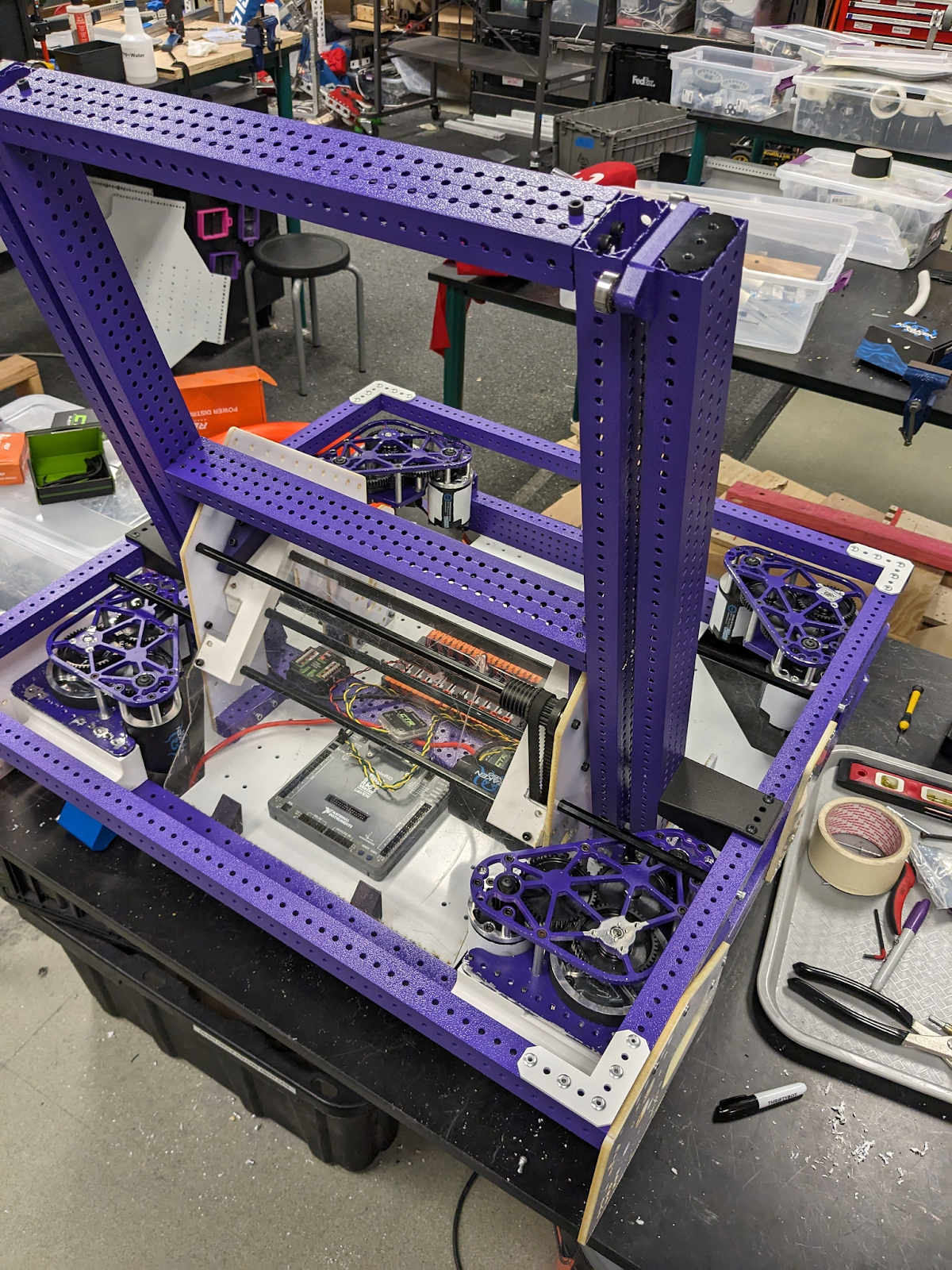
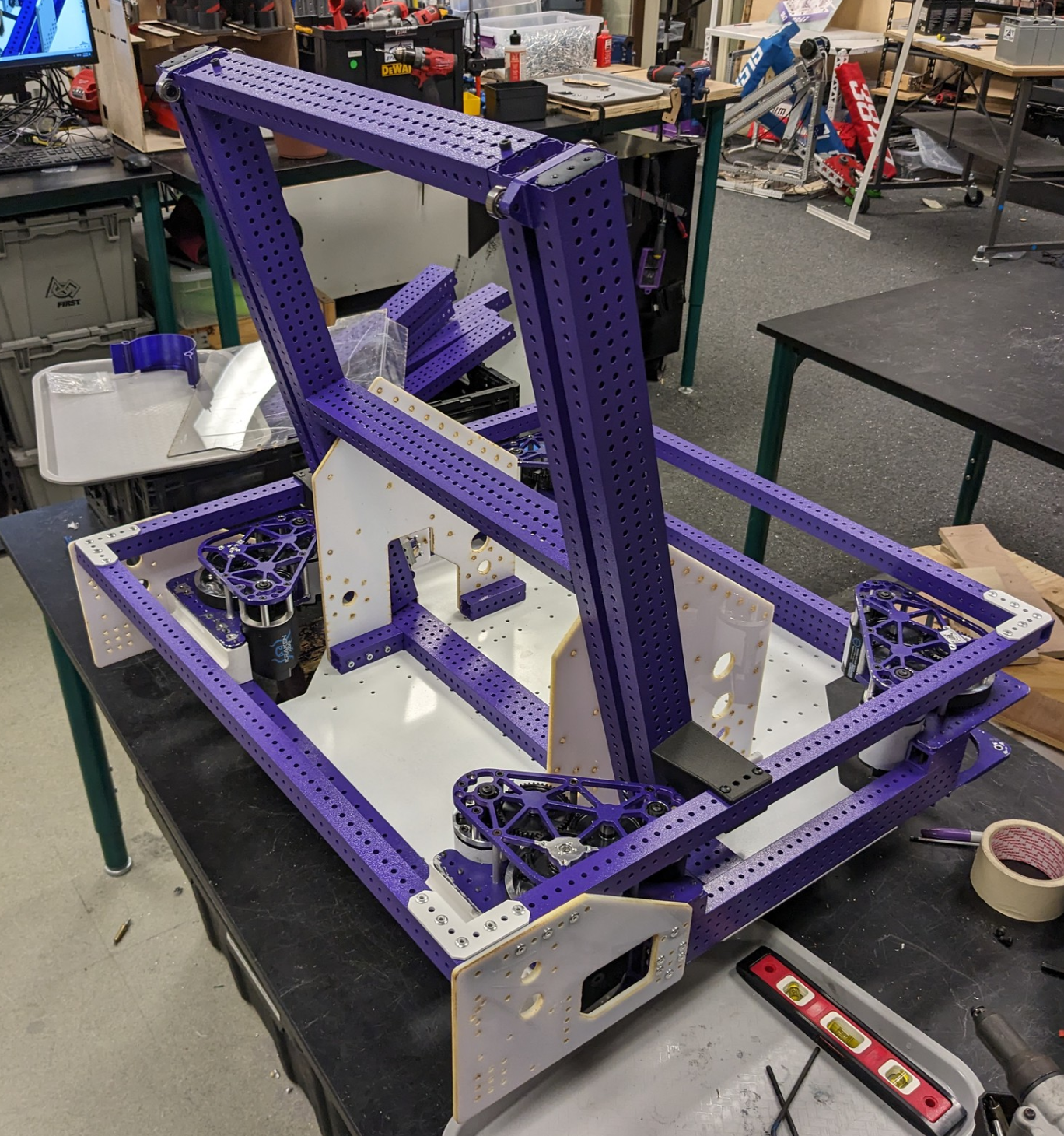
Saturday, February 10, 2024
Day 35 & 36: PM Assembly
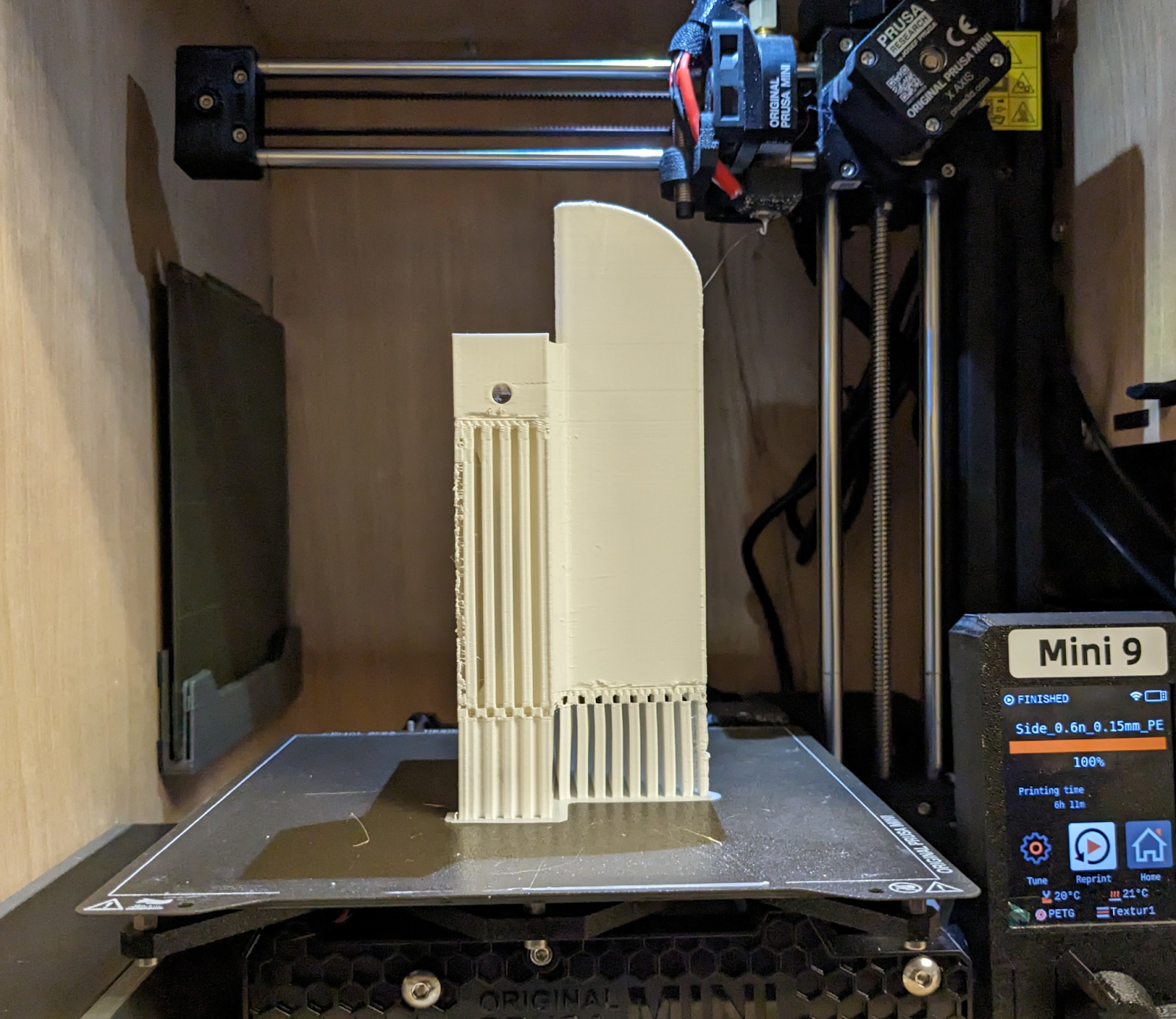
3D printing
We have our print farm running a lot of production parts for the 3 robots (PM, FM, & Photon). Here are some of the timelapses from the Bambu X1C.
Intake Gears+Pulleys
https://photos.smugmug.com/2024-FRC/Build-Season/Week-5-2024/i-HRkDPS9/0/0ae070c6/1280/video_2024-02-09_21-42-06-1280.mp4
1.25” OD Roller Pulleys
Elevator Top Frame Support
Laser Cutting
This is our laser cutting a test part of the launcher sector gear so we can test the fit. We manually adjusted the teeth size to remove some of the backlash in this gear.
CNC Router
It’s hard to get a good video through the chip curtains but this is our router cutting some of the climber+elevator gussets.
(It’s a loud video)
Tapping Station
This is a video I made a couple of weeks ago to show someone how the tapping station we purchased in the fall works. It’s pneumatically powered and has a lever to turn it on and a button for reverse. It has made tapping shafts so much faster and we’ve used that to design a lot of standoff into this year’s robot.
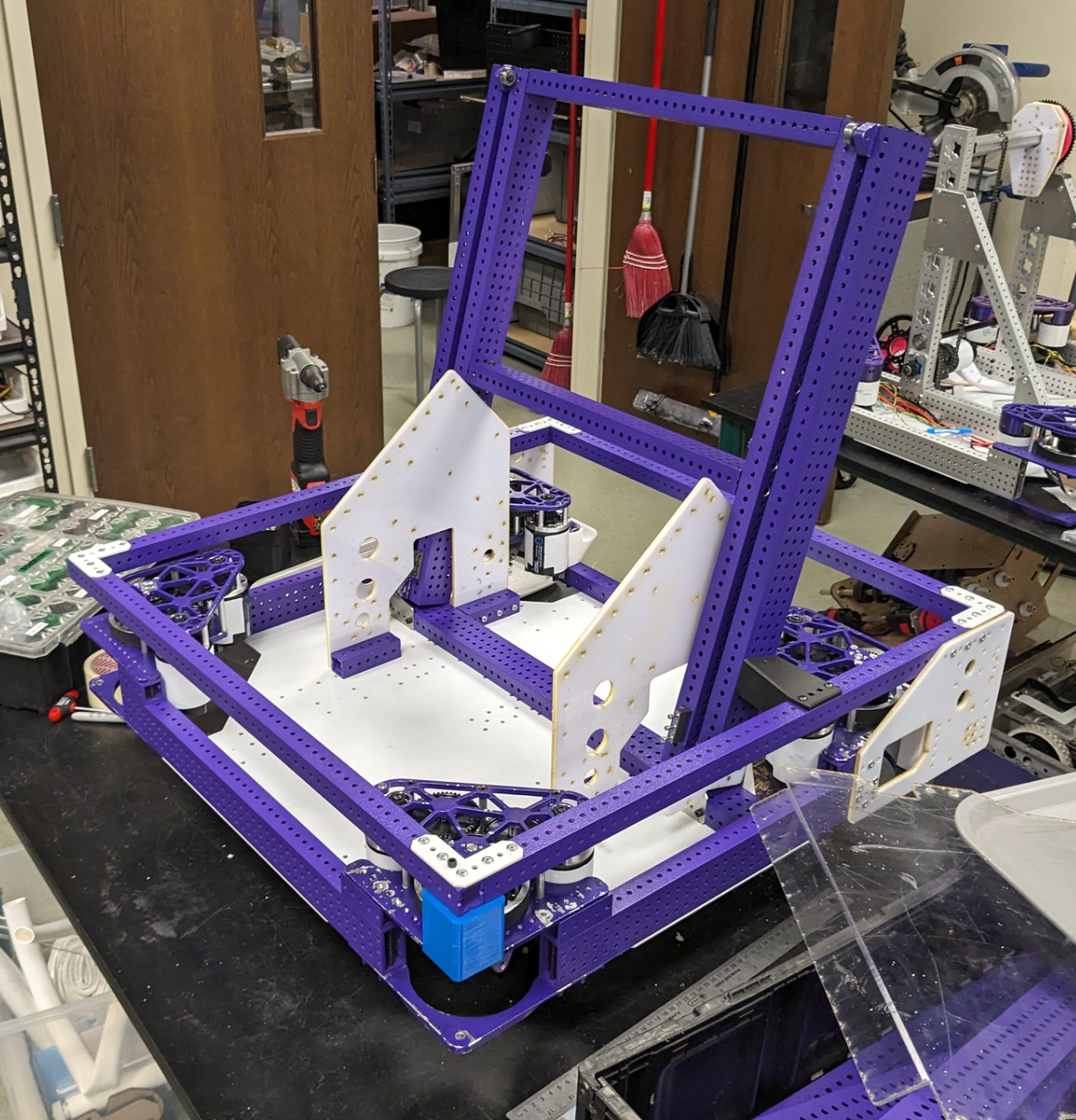
Test Fitting Controls
We started test-fitting our electronics layout. Our general plan is to leave as much of the belly pan open as possible for electronics and then just fit them where they make the most sense. Nearly everything is held down by VHB or foam mounting.
Thursday, February 8, 2024
Day 34: More Trap Testing and PM Assembly
Trap Testing
We did some limited trap testing with a new hook geometry and bearing setup.
https://photos.smugmug.com/photos/i-57bLqrP/0/1920/i-57bLqrP-1920.mp4
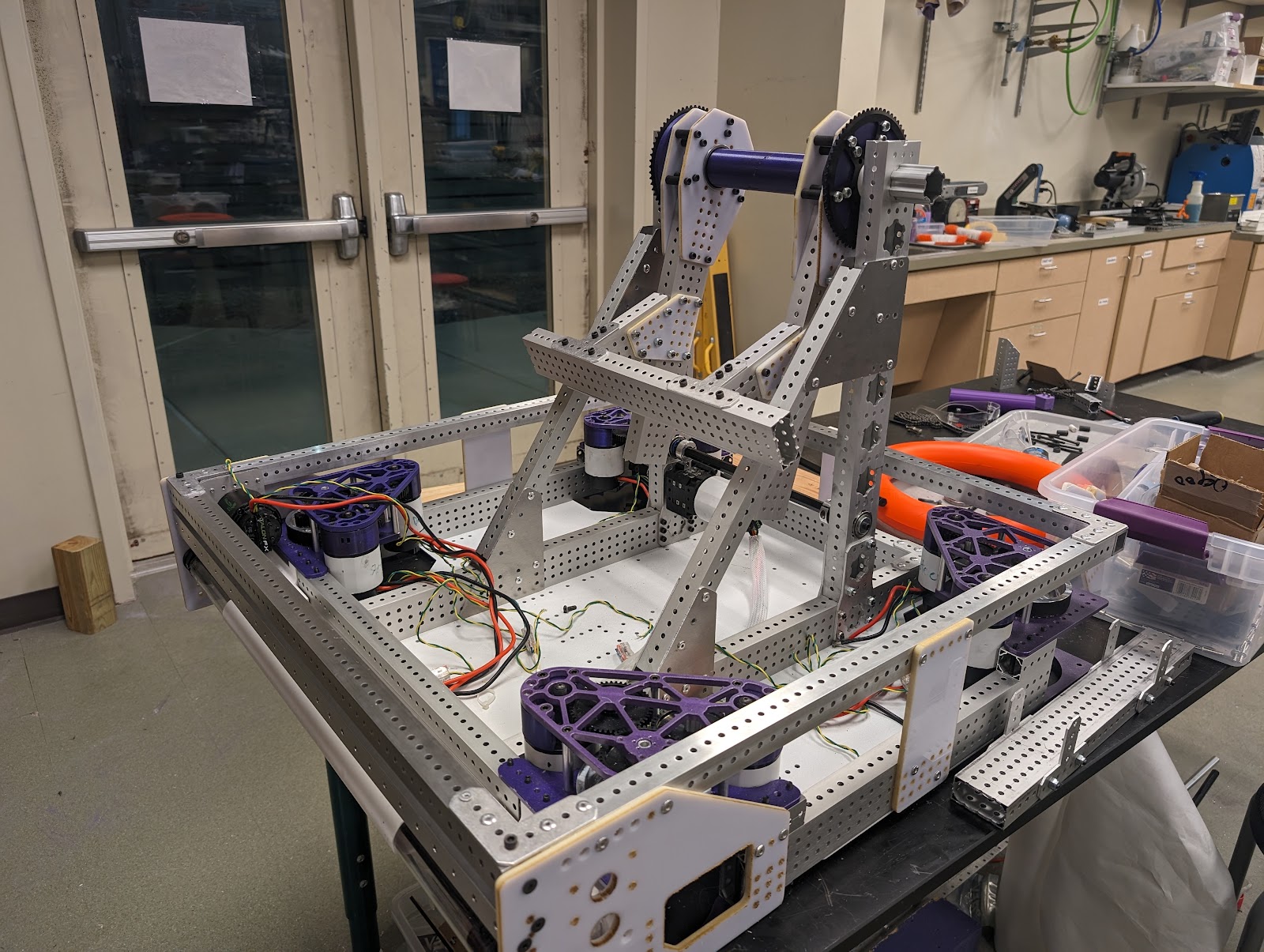
PM Assembly
We have begun rapidly assembling our practice robot. The intake plates, elevator, and main indexer+launcher pivot plate are mounted.
{kind=link}
{kind=link}
Intake Wedge printed in PCTG.
Subscribe to:
Posts (Atom)