
The majority of the past two build days have been spent on the assembly of our prototype robot. This weekend we should have it driving, and most of the mechanisms running.
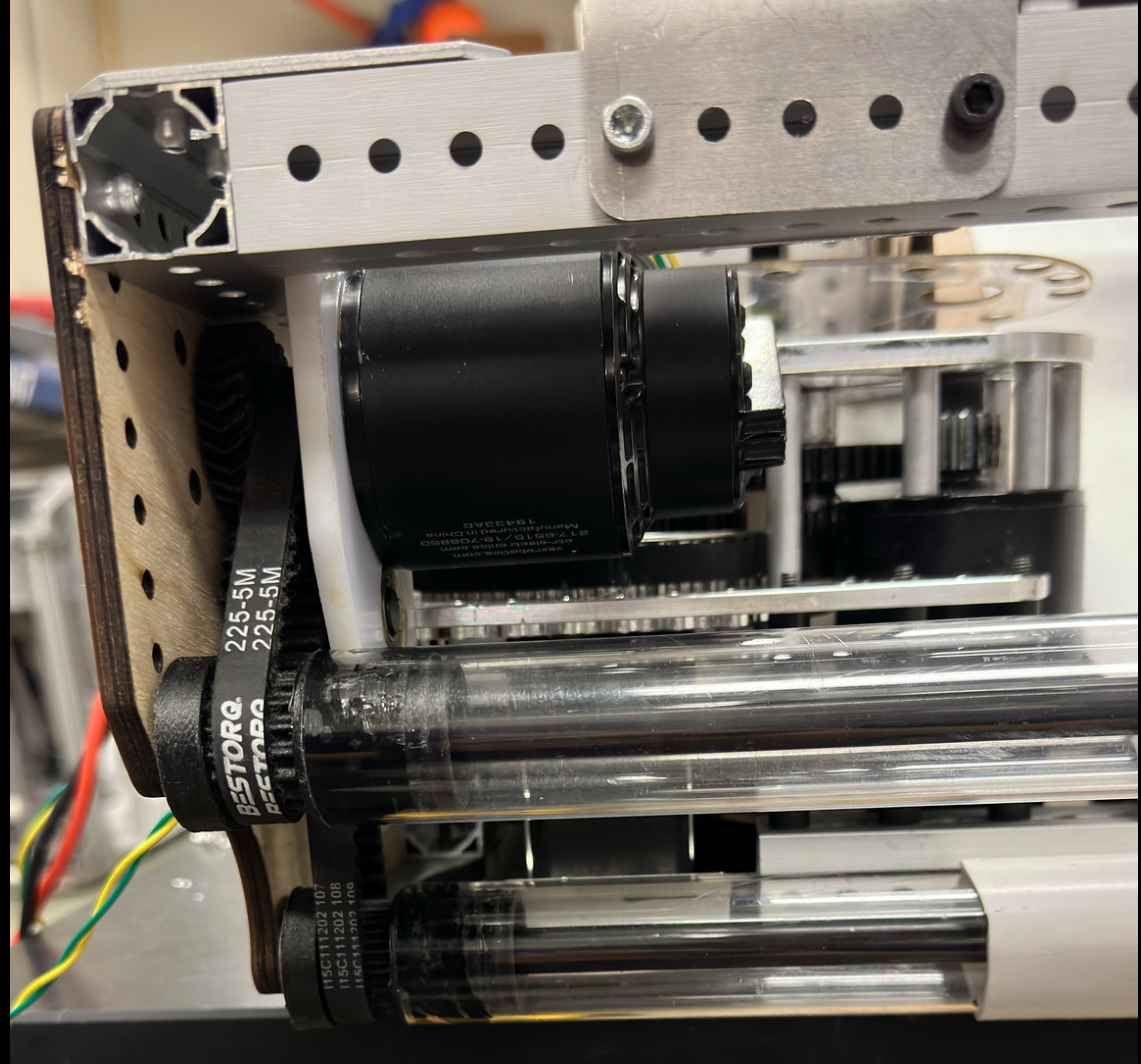
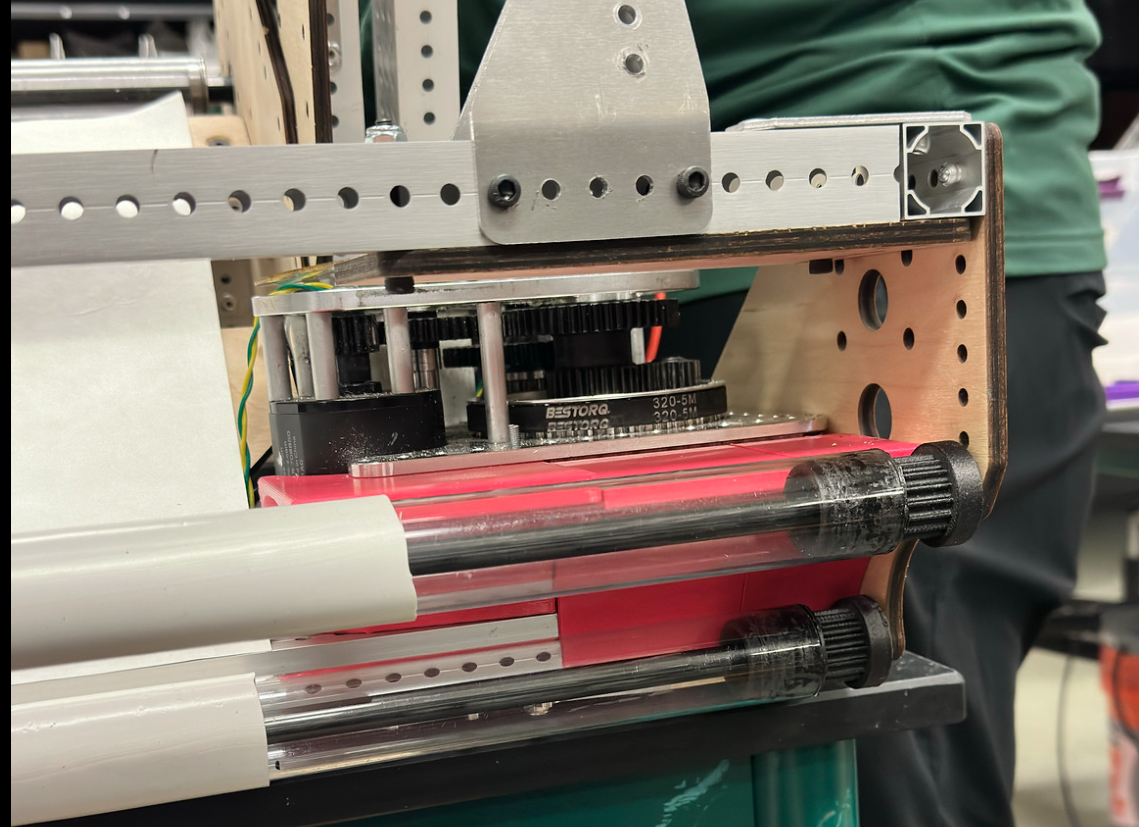
Intake V1
We fixed some of the spacing, lifted the motor higher, switched to hearing bone gears, and remade the rollers to be full width and silicone tube only on the center 14 inches. We are still on V0 of the wedge design and are hoping to have a V1 concept this weekend or early next week. We are using hot melt glue to hold the roller hubs-pulleys into the polycarbonate tubing. Currently, we are using “Power Adhesives TEC Bond 7718 Polyamide Black” hot melt glue sticks and they seem to be holding up pretty well. The nylon hot glue bonds to the nylon-carbon fiber filament and polycarbonate tubing pretty well. For the competition versions, we are likely to run at least one screw in each hub. The hot melt glue works well because you can easily rework the parts by heating it with a heat gun.
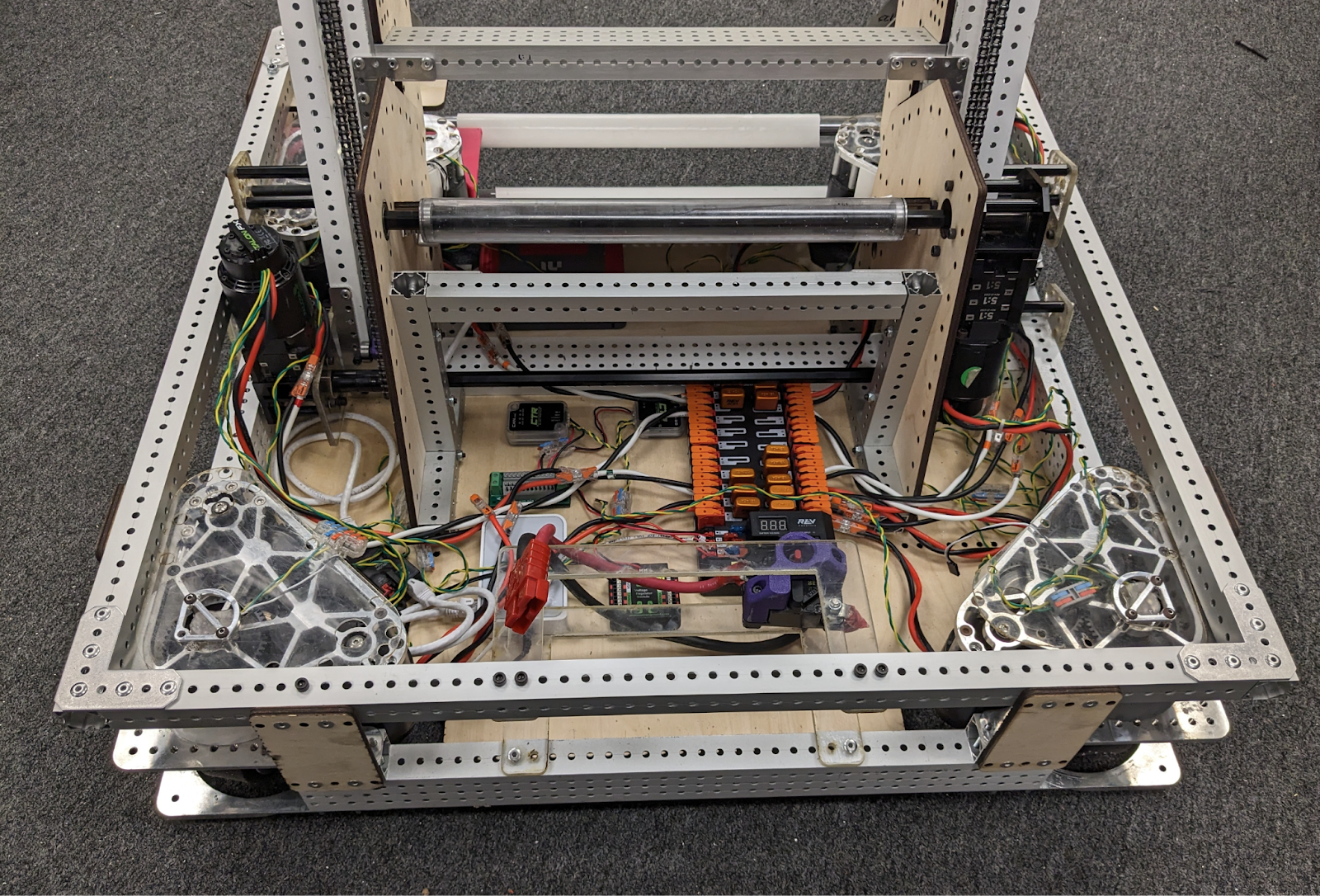
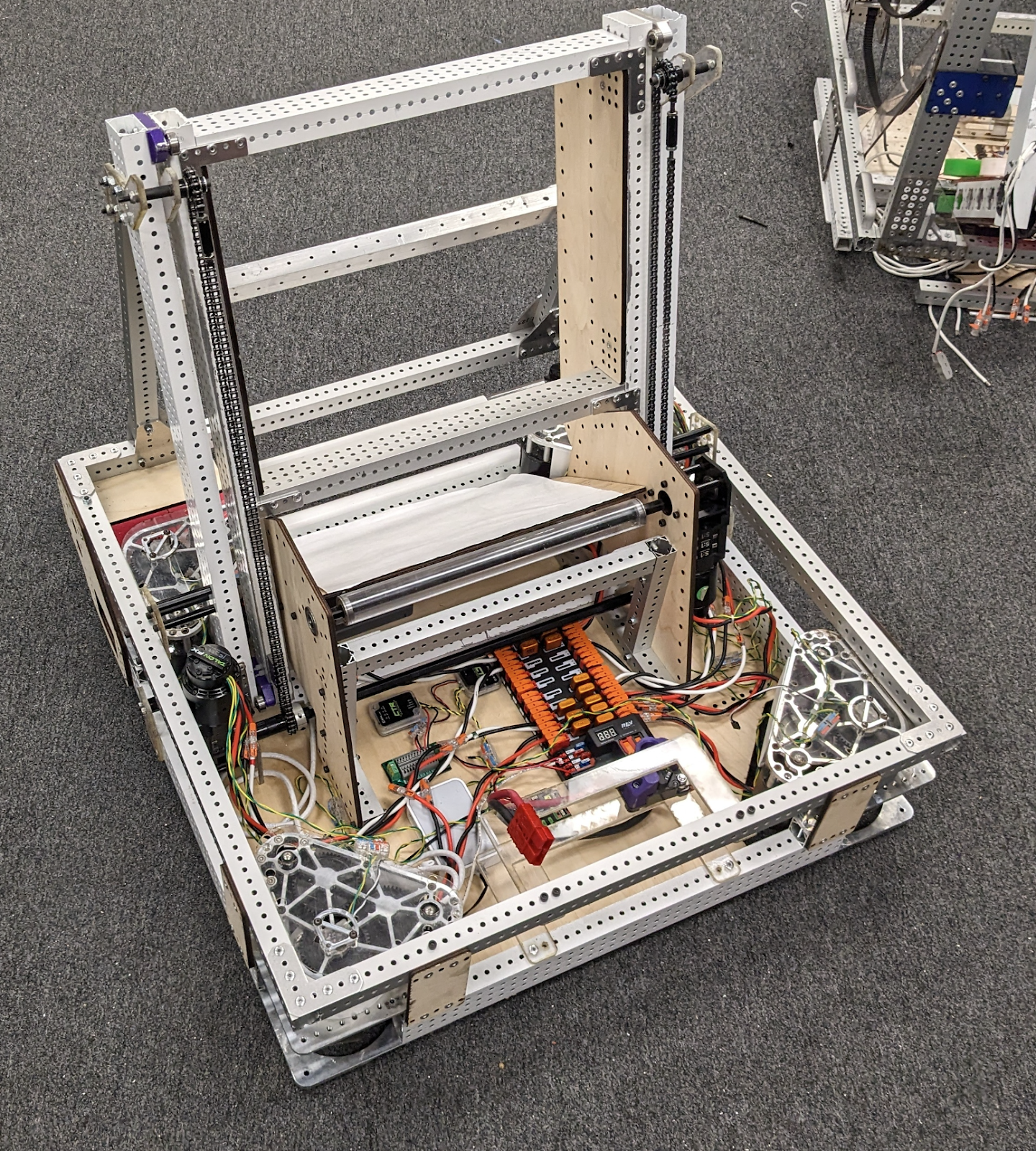
Electrical
We were able to lay out the electronics on the belly pan and get the majority of it wired. We still have more motors but the main items are all there. The roboRIO is tucked up under the note ramp in the back.
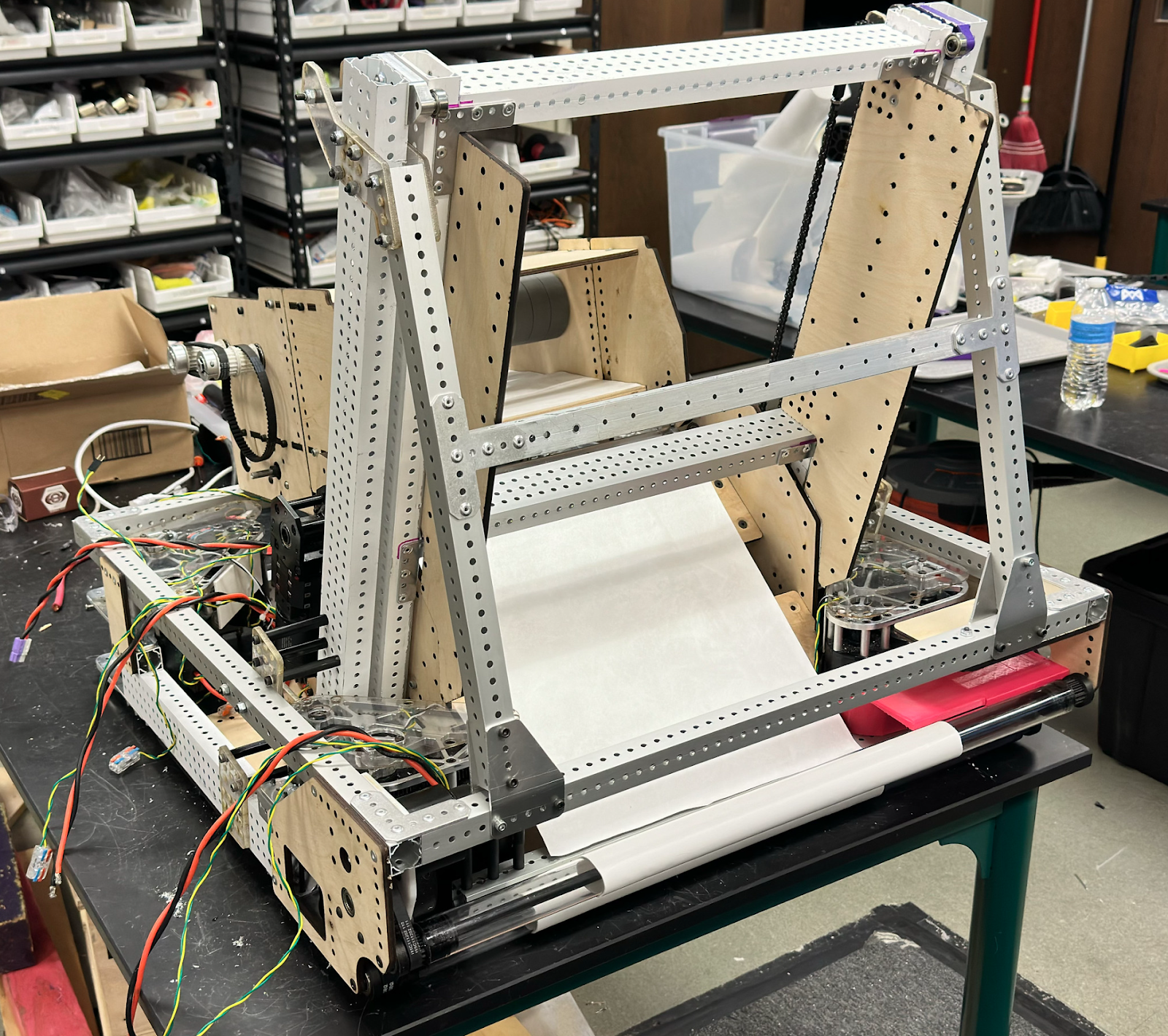
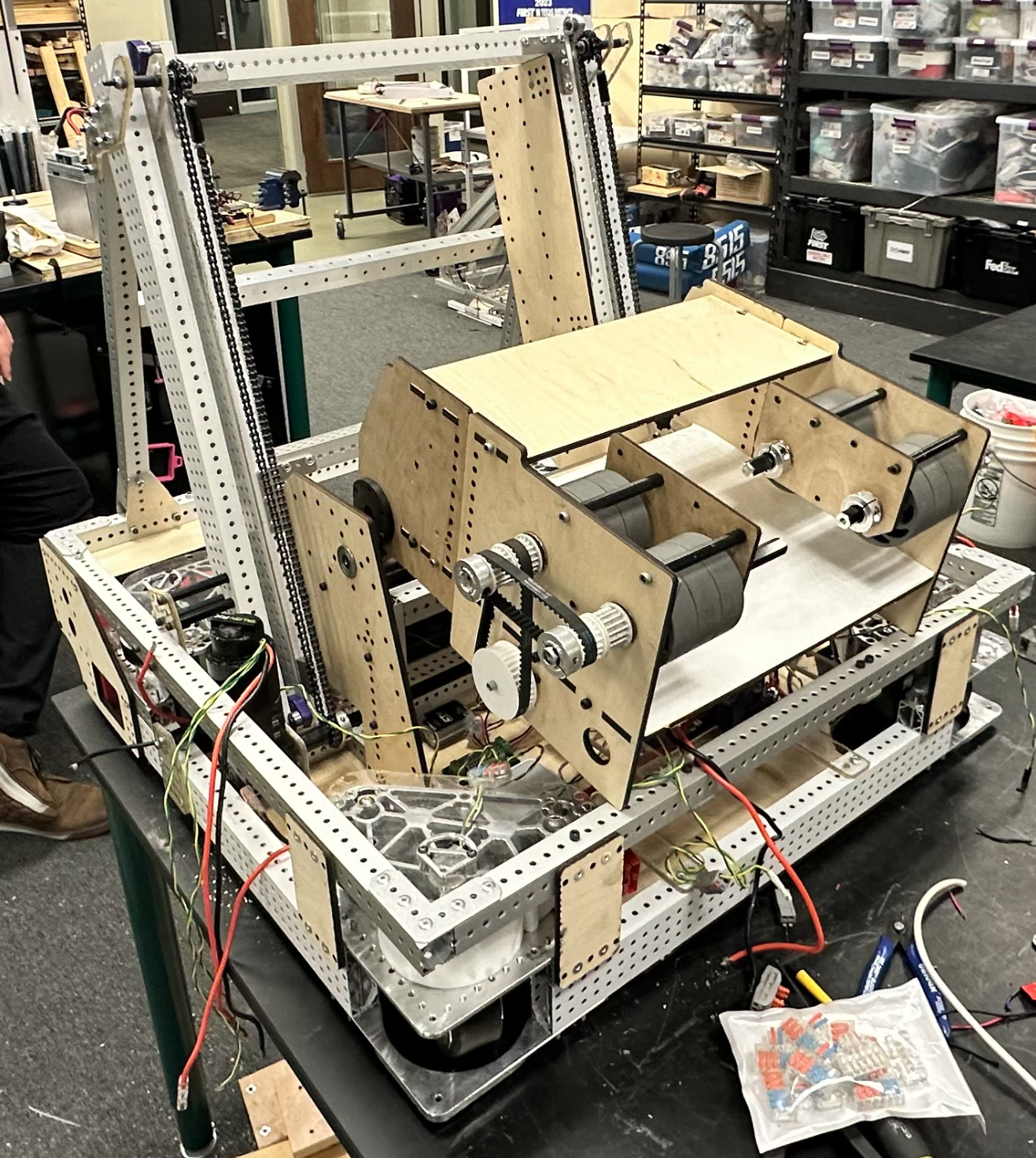
Mechanisms
We have the Amp-Trap elevator installed, and the indexer ramp. The launcher prototype is mostly assembled and will be tested off the robot tomorrow. We still have more rollers to assemble and some design work left on the climber and amp-trap mechanisms.
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.