We are thrilled to be the 2022 Dripping Springs District Winners with 6800 Valor and 5503 Smithville Tiger Trons.
A big thank you to 6800 for picking us to be on your alliance, you all have an awesome team and robot this year. Thank you to 5505 for joining us and being a great alliance member, your driving skill made our alliance so much better.
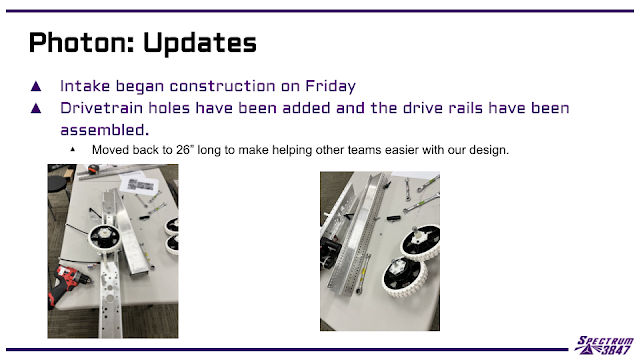
Infrared Mechanism Notes from the Event
1. Drivetrain - The SDS MK4i modules worked extremely well, we swapped 5 wheel treads during the event due to wear and cuts/delamination which is better than we experience with the MK3s at the Texas Cup event this past summer. Other than adding grease (we use PTFE) the swerve modules were maintenance-free.
2. Intake - The intake performed very well, the floating roller was able to precisely pick up the cargo we wanted and do so quickly. We have a 3D printed pneumatic cylinder clevis break that we swapped with a metal one but that was honestly to be expected. The belt slipped off the pulley a few times but the design doesn't allow to fully come off so the intake continues to work, we will reprint that pulley slightly wider and possibly increase the flange height to prevent this in the future.
3. Ball Path - The ball path indexer and feeder rollers were pretty much maintenance free they just worked all competition. We clean all our rollers with simple green between matches to remove hair and dust and that's all we had to do to keep these systems working.
4. Launcher - We were running a very simple launcher software with two hood positions and wheel velocities one for the tarmac line shot and one for the fender shot. The fender shot worked on the practice field but wasn't working well on the real field so we abanded it and basically ran fixed hood, single velocity the rest of the event. We had one big launcher issue where the belt to the hood came off and destroyed its pulley, so we had to replace it, we also printed some upgraded pulleys at the event (we bring a Prusa mini with us) but never needed to install them. We also discovered after the event one of the printed pulleys on the falcon wore down a lot and should have been replaced at the event but it didn't affect our performance much.
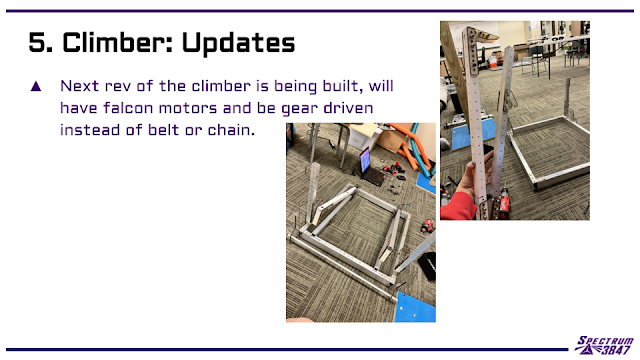
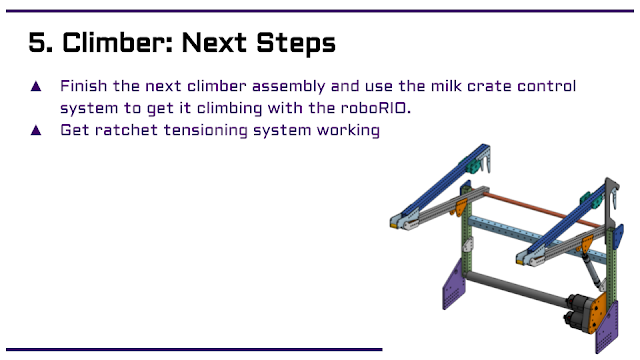
5. Climber - As expected our climber needed the most help during the event. We identified some issues when we tested the climber with the full robot weight compared to our test chassis (weighs ~85lbs). We were able to install larger (1 1/16") bore cylinders and change the strap path to the spool to fix these issues before the event but there were still some tuning to do. The winch strap wasn't wrapping consistently so we had to disable soft limits to ensure we could reach the rear latches each time and we were tuning the motion magic distance values to automatically unwind and wind the winch, once we got those working Saturday afternoon the climb we relatively consistent and we could high bar as needed. We believe the traversal would have worked as well but we were never in a situation where the extra 5 points were needed and it was never worth risking the RP and in the playoffs, the extra points wouldn't have affected the match outcome.
6. Controls - we were running a pretty limited software setup for this event. Our autonomous mode was just timed-based driving (using the velocity loop on our swerve drive) and simple command groups for the double ball auto. The launcher was a feedforward + PID loop to a single velocity for the tarmac line shot. Limelight tuning was set up during the field calibration window before the practice matches and needed to be pretty different from our home setup due to lighting and we used the smart target group feature for the first time. Motion Magic was used on the climb to make it easier to control. We didn't have any electrical or controls issues throughout the event.
Scouting/Strategy Notes
We used the new scouting systems designed by 2713,
Link. This system worked very well, it doesn't need wifi/internet access and you can collect the data easily. We used amazon fire tablets and a QR code scanner from Amazon.
Our strategy lead posts strategy notes for our drive team before each match, here is an example of what is sent prior to each match.
We are RED 2
4063 3847 8507
■■■■Qual 49■■■■
4734 7521 3834
- We have 4063, focus on balling out and high climb for 4 rp
- Expect defense from 3834
- They have a double mid-climb + 1 low goal scorer
This gives our drive coach enough information to go to the prematch strategy meeting before each match to make a plan for our alliance.
Photos and Videos:
Spectrum Dripping Springs Photos - Dripping Springs teams feel free to use these photos for any team promotion, etc.
Spectrum 2022 Dripping Springs Match Videos



.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)