
Our current design priorities
Robust robot: full-speed impacts will be worse than last year. As little should leave the frame perimeter as possible. Electronics should be strain relieved, vibration mounted, hot glued, etc.
Fast and stable: fast drive speed for the longest cycle distances we have had in any game, full cross-field path from source to amp. A large wheelbase is more stable during high-speed collisions. A larger wheelbase/frame allows for easier packaging of mechanisms handling the 14” wide game piece. The drawback is it may be slightly harder to climb on the same chain as 2 other robots, but we don’t think triple climbs will be that prevalent with the trap climb mechanics.
Low belly pan and high bumpers: This configuration allows you to control the contact point with the notes. With low bumpers, the curved profile of noodles may allow notes to jam under them during collisions. High bumpers also give space for the notes to compress when driven into a wall or another robot. If a note does get caught under a low belly pan, it’s smooth, and a robot should be able to drive off it as long as a wheel, or two are still touching the ground. This also prevents you from driving over notes damaging them or getting them caught in your wheels or gears.
Short: Able to drive under the stage. Driving under the stage eliminates choke points and opens up more cycle paths. A high launch height could score over short defenders but 48” tall defenders are probably still blocking nearly any shot since the shots have zero arc. At high levels of play, teams will probably be able to use climber/trap mechanisms as tall blockers, so shooting over defenders isn’t high on our priority list anymore. We are designing to be 27” tall.
Low launch height: A lower launch height gives you a larger target window into the goal for all of the distance shots in the game. We also want our launcher to get lower as the angle decreases and release higher as the launcher angle rises. (when near the subwoofer)
Ground intake: Allows for multiple note autons, picking up of missed shots, stealing from opponents' source zone, etc. Ground Intake should feed both the amp and speaker scoring paths. An under-bumper intake allows us to meet this goal while still being robust. Robots that can also directly source intake may have some advantages.
Amp and speaker scoring: Both parts of the game will be critical to alliances maximizing their score.
Continuous release angle adjustment: with no shot arc, your launcher velocity isn’t going to be able to adjust your flight path very much so you need to adjust the angle to be able to make shots from multiple positions. In 2013 there were only a few ideal protected shooting locations so being able to shoot from just 1 or 2 places was enough to be a top-tier robot. With this game having only 2 protect locations (podium and amp zone) you’ll likely need to be able to shoot from multiple locations to speed up cycles. The subwoofer shot also needs a very steep angle. Some teams will do very well to pick a single location and shoot from there every cycle or just two, such as podium and subwoofer, etc.
Consistent Feed: To get a consistent exit velocity you need a consistent feed into your launcher. This likely means the feeder mechanism should tilt/angle along with your launcher.
Vision alignment to speaker, amp, and stage: With all three of these elements not being directly in the path of drivers-robot-element like many games where you are scoring down field having vision alignment or, at the minimum, a camera for the drivers to use for aiming is going to be critical. Lining up to climb the far stage where the robot is coming straight back at the drivers will be pretty difficult.
Launch/pass notes under the stage: Launching/passing under the stage gives you more shot locations and the ability to pass notes downfield to alliance partners or stash. This means you need to be able to launch at a low angle from a low height.
Trap climb: needed to rank high. We’ve done enough tests with the wall roller climbs that getting a mechanism to the bottom of the trap door doesn’t appear that difficult. Doing it consistently should dramatically improve a team's rank. Combining the amp and trap mechanism makes a lot of sense because they both likely need to extend above 27” to score easily, reliably, and quickly. This requires something to extend above 27” and something to pull the chain so that your robot lifts, likely to your bumpers.
Things our robot won’t do in our current priorities
Buddy Climb
Turret
2 or more sided Intake
Launch from above 27in
Intentionally drive over notes
Tiny Robot: likely a 29.5” square frame perimeter
Catapult: we will use a wheeled or roller launcher
Current Leading Concept
The concept we are now primarily developing is based on a sketch from FRC#111 Wildstang (Robot Type 2 in this blog post)
It appears to meet all of our design priorities. Here are the sketches and KrayonCAD version of the robot. Neither of these includes the climber arms that will pull down on the chain.
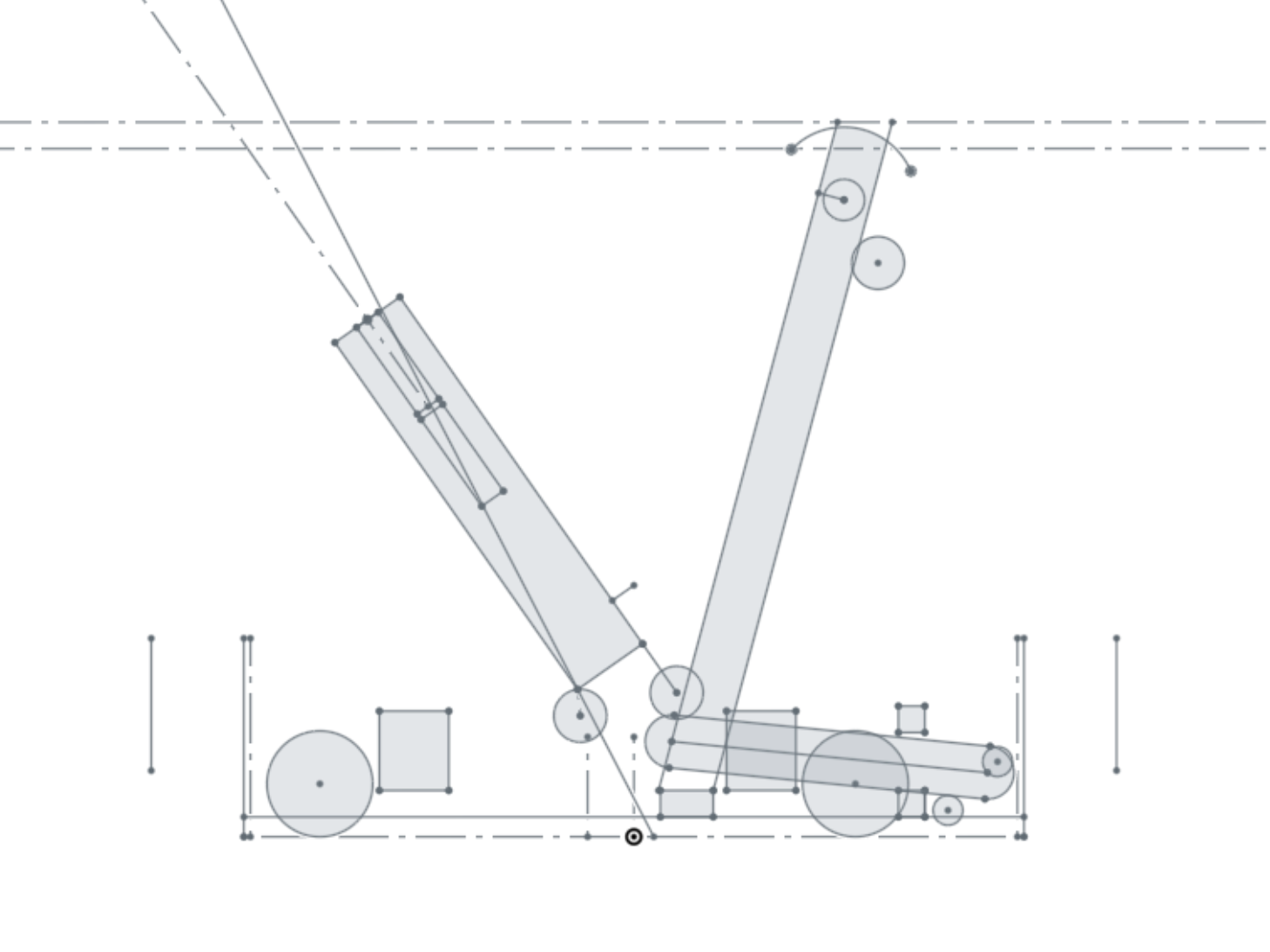
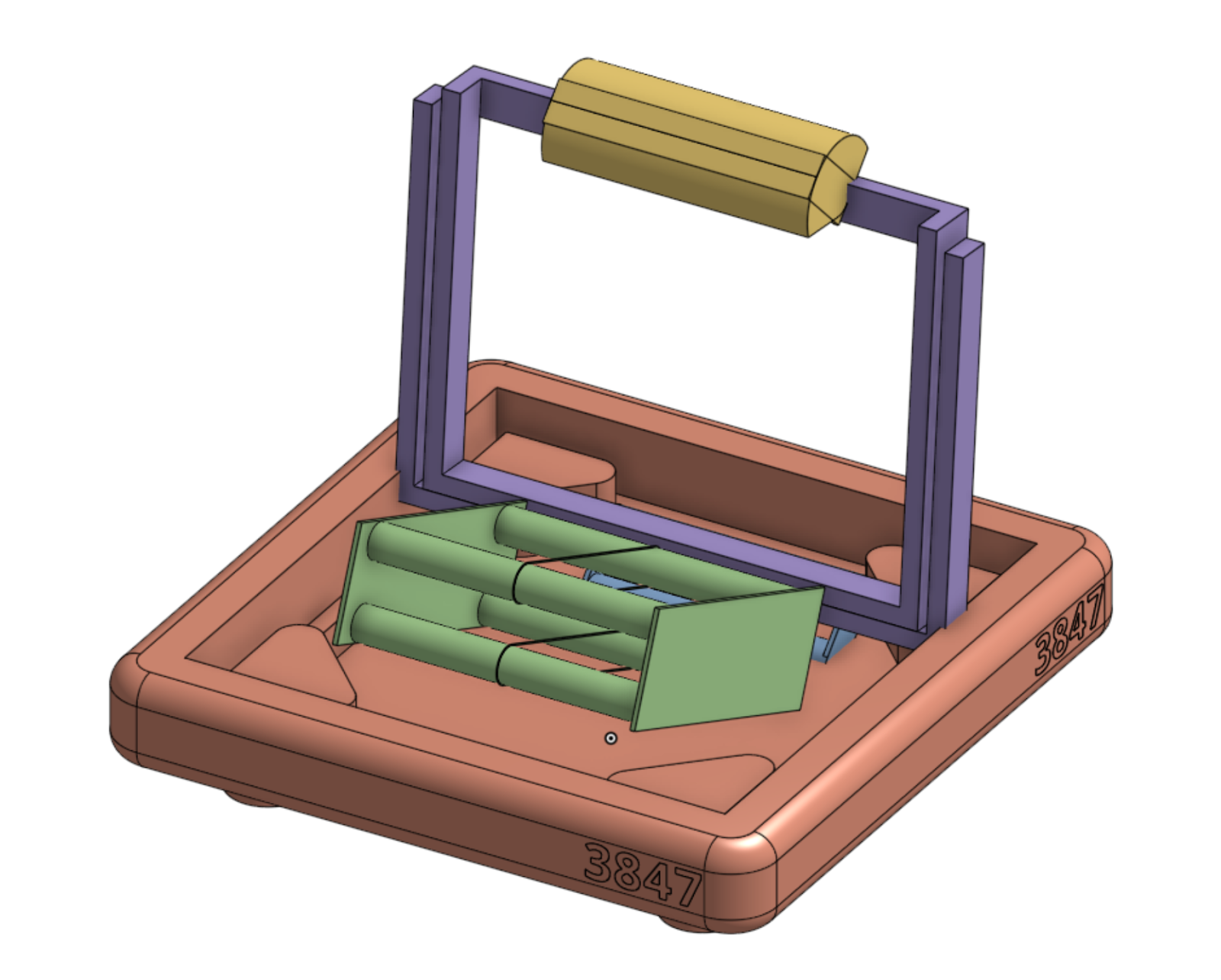
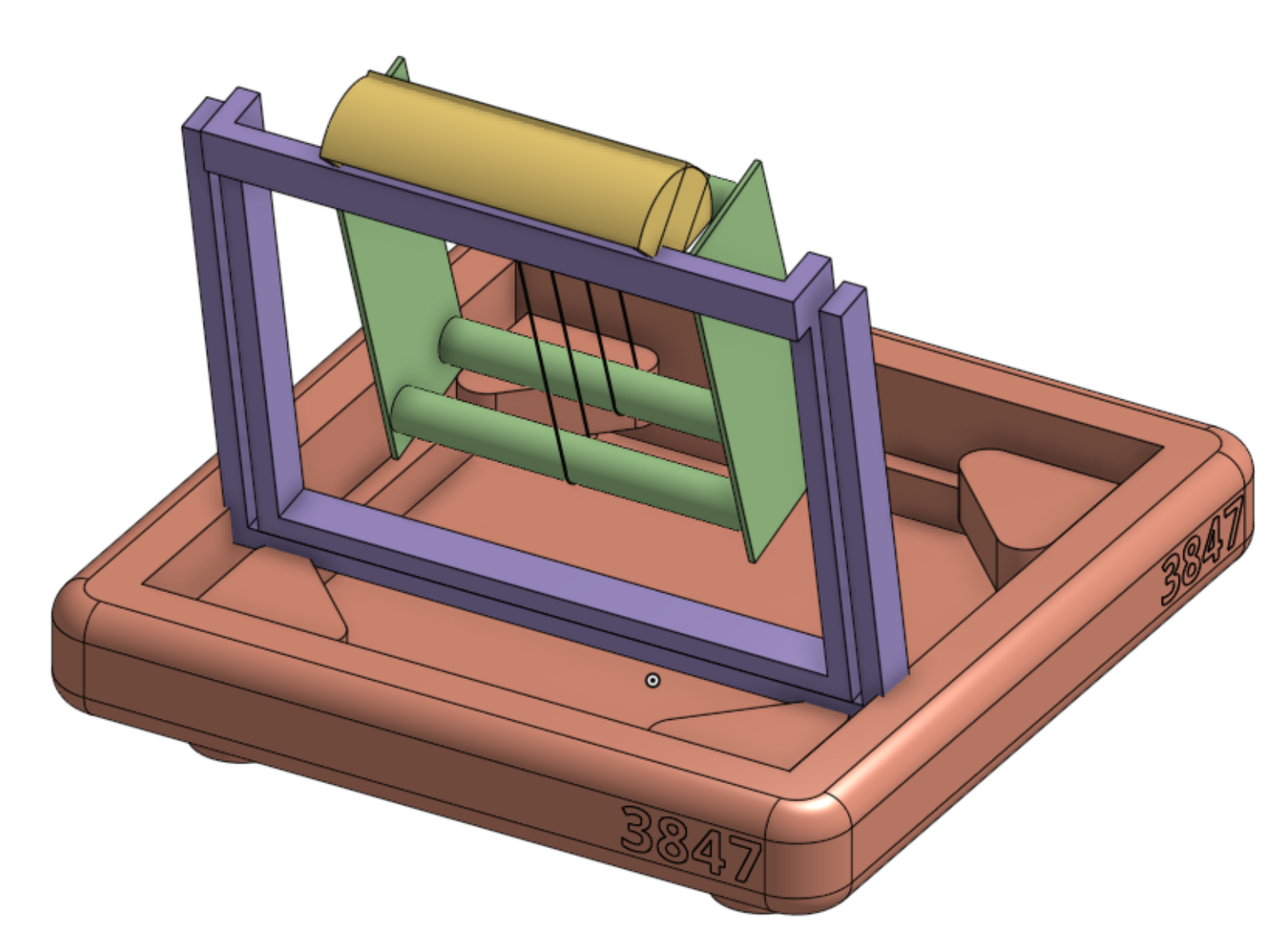
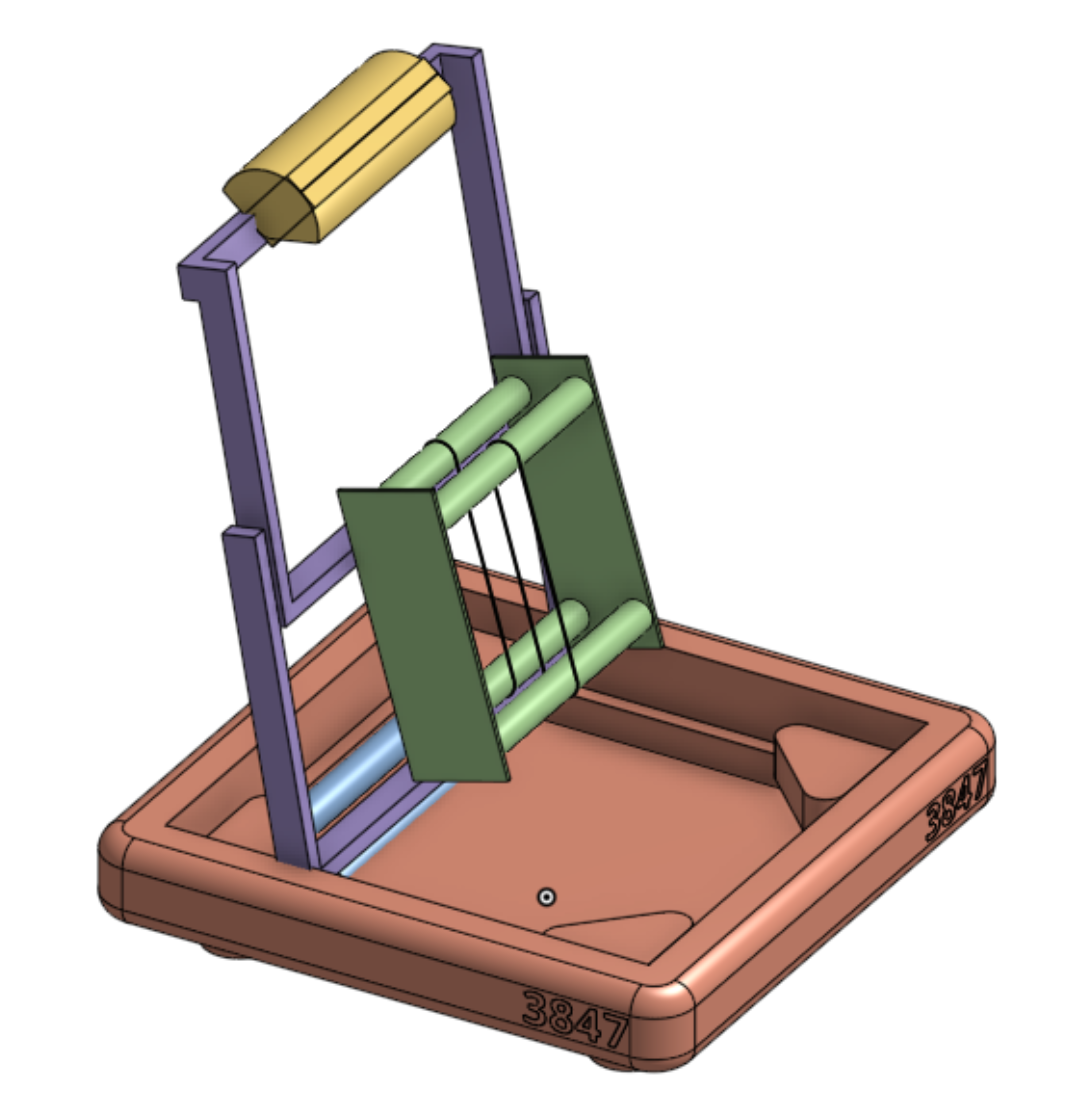
Swerve drive with low belly pan and under bumper intake similar to yesterday’s post.
The launcher is mounted on a pivot that is fixed to the frame.
AmpTrap mechanism is mounted on an elevator that raises it to place in the amp and goes higher to climb to the trap.
The elevator holds the wall climber wheel, and arms pivot from the back to pull down on the chain to lift the robot.
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.