
Switching to 4-bar from Slider
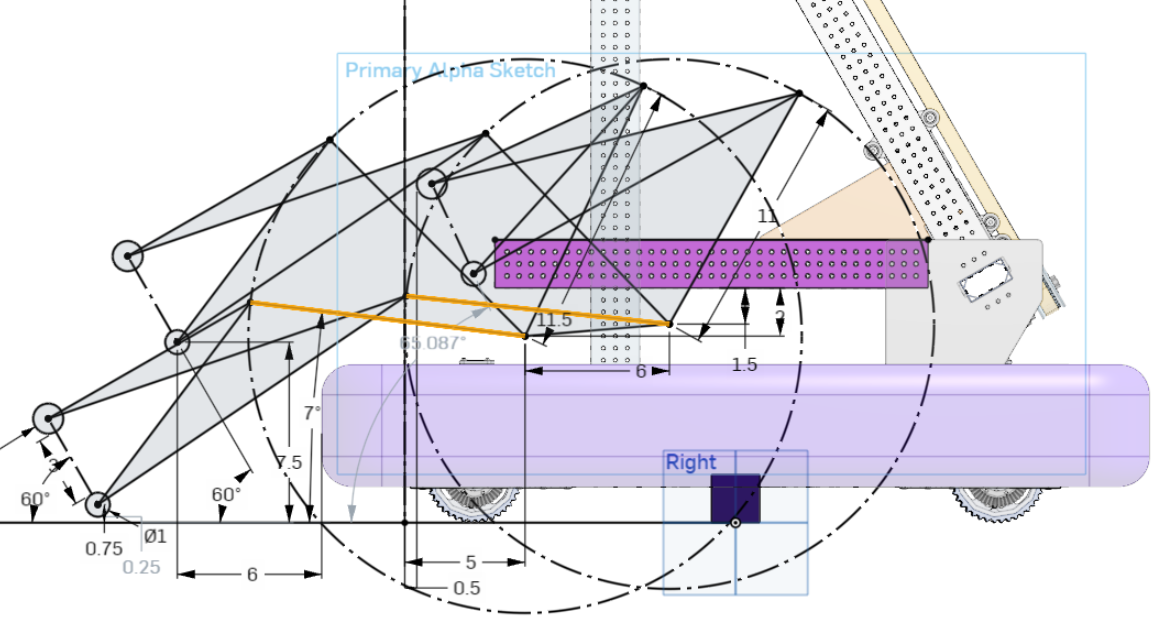
We are switching system 3 from a linear slider to a 4-bar linkage. This allows us to use our full elevator extension for raising the intake and use the 4 bar to lower the intake to the ground for pinching cones and picking up cubes over the bumper. This system configuration won’t allow us to crash the intake into the robot like the elevator+slider setup would. This should give us more reach and extension than our previous configuration.
In this sketch, the circles represent three of the intake’s positions. The lowest setting is for intaking cones from the floor, the middle for intaking cubes, and the highest for its stowed position. The orange lines are the bars in the fully extended position.
Continuous Timing Belt Elevator
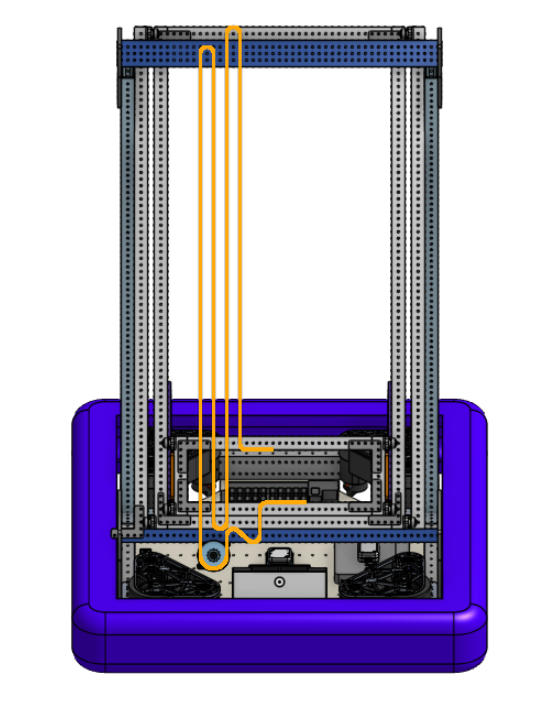
We worked on one of the possible ways we will power our elevator- by using a continuous timing belt to drive up and down the elevator. This has some advantages. We only have to tension one thing instead of the two a cascade setup would require. When we are scoring low and mid, we will only raise our carriage, which should keep the CG slightly lower.
Robot Inspiration
Nick Aarestad’s Linkage Video: https://www.youtube.com/watch?v=QsAC_seQHJY
2910-2018: Timing Belt Path on the Elevator
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.