
Our Alpha elevator uses a timing belt and idler pulleys as its motion system. It’s designed around the 0.5” hole spacing on the REV Maxtube and uses the REV Max tube plugs to allow us to bolt the idlers into the rail.
The main drive pulley is a 32 HTD 5mm hex pulley with a TheThrifityBot 3D print ½” hex insert in it.
The belt for the elevator has to be designed so that each of the vertical run is perfectly vertical, any angle in those runs will cause the belt path to change total distance as the elevator moves up and down thru its motion.
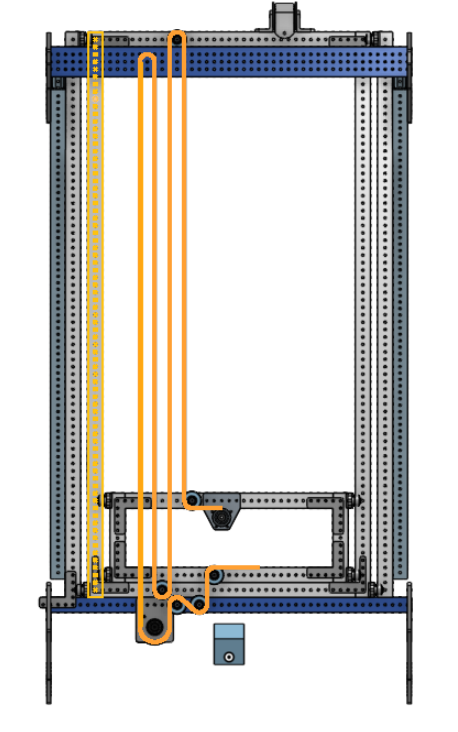
To allow these to be vertical paths we are 3D printing our own idler pulleys that are based on the width of the 5mm timing belt and the ½” hole spacing.
The 3D printed idlers are explained here
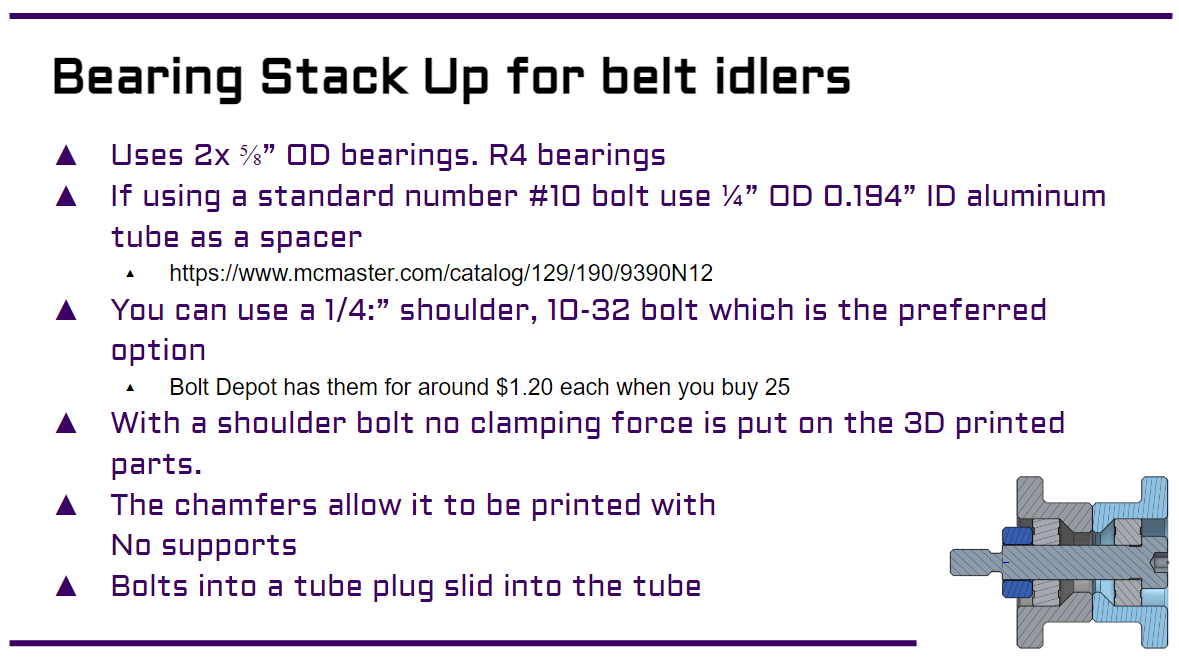
Tube Spacer Link: https://www.mcmaster.com/catalog/129/190/9390N12 We sanded these and then cut them to length on our lathe.
These spacers may also work for this purpose but we haven’t tried them yet - https://www.mcmaster.com/93441A425/
STLs and STEP files for the pulleys can be found here: https://www.printables.com/model/373552-spectrum-3847-5mm-htd-elevator-idler-pulleys
For Alpha, we are using 3D printed tube plugs with the ½” OD tube spacer and 3” long 10-32 bolts so they are supported through more of the tube and can’t bend as easily. We haven’t been able to test the shoulder bolt solution with the aluminum tube plugs yet as we are still waiting on that order to arrive. We will decide if we want to use the long bolts with tube spacers or the shoulder bolts in the coming weeks.
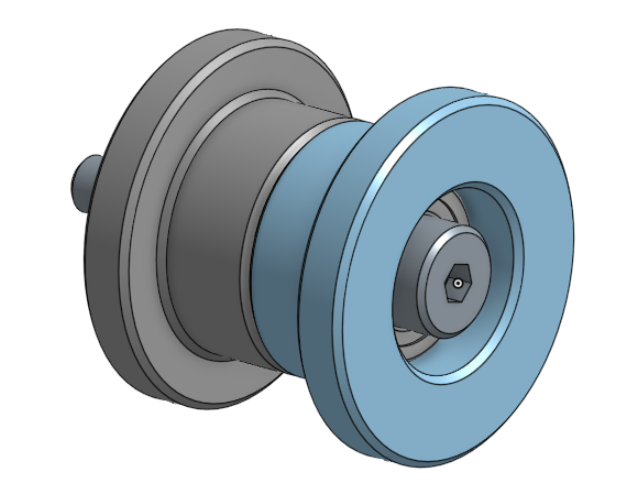
3D printed Idler pulleys for 5mm belts with ½” hole spacing.
The belt is tensioned by mounting one end of the belt to a hex shaft that is spinning in a ½” ratcheting wrench (you can also do this with a ⅜” wrench and ⅜” hex shaft). So if we need to add tension you just turn the shaft a few clicks tighter.
The other end of the belt is secured to the elevator using a laser-cut polycarb bracket and zip ties.
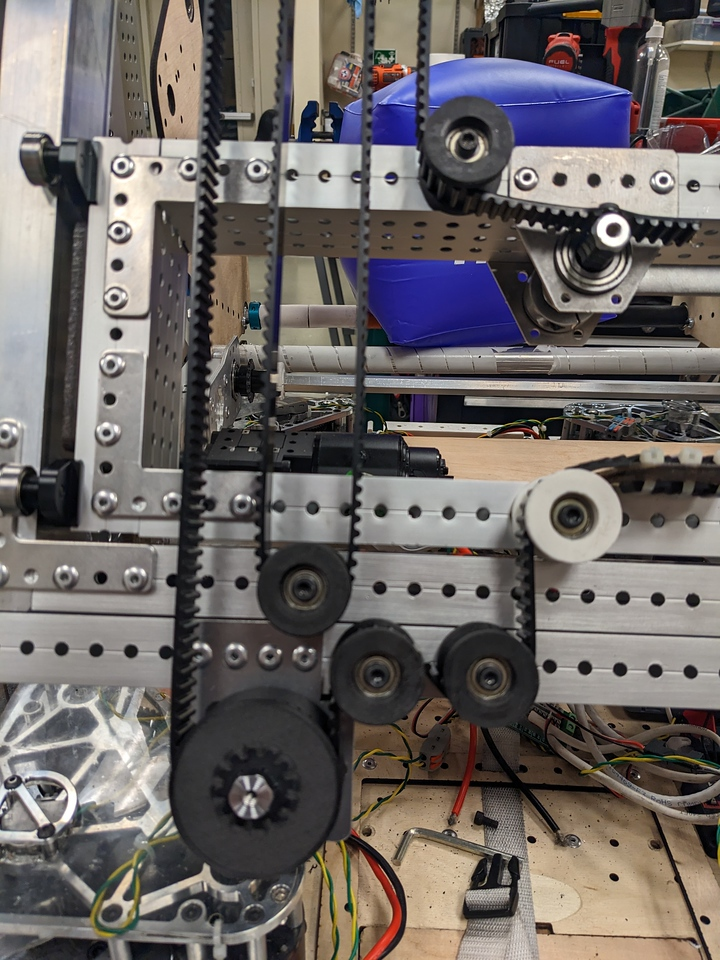
We are currently using TheThrifityBot Constant Force spring and mount from the TTB Elevator Kit but we will likely move to a custom design for our competition robot.
The side bearing blocks on the Alpha Robot are the TTB Bearing Block Kit and for our competition robot, we are planning to use WCP Inline Clamping blocks since their hole patterns line up with the REV tube and tube plugs.
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.