Results:
Excellence in Engineering Award
We ranked 4th, was the 1st pick of the 1st alliance, and were eliminated in our third playoff match. We ended up with a 9-4-0 record. Thank you to our alliance partners 2200 MMRambotics, 2137 The Oxford RoboCats, and 503 Frog Force!
For the first time in our team’s history, we were awarded the Excellence in Engineering Award, completing our robot award hexfecta. We are extremely grateful to be recognized with this award at the Worlds level.
Failures and Fixes
Failure: The bottom intake roller was somehow missing one of its bolts during our first match. Oops. We managed to play normally until around 0:40 left, when a defender pushed us up onto the roller and stayed there so we couldn’t move until they moved away.
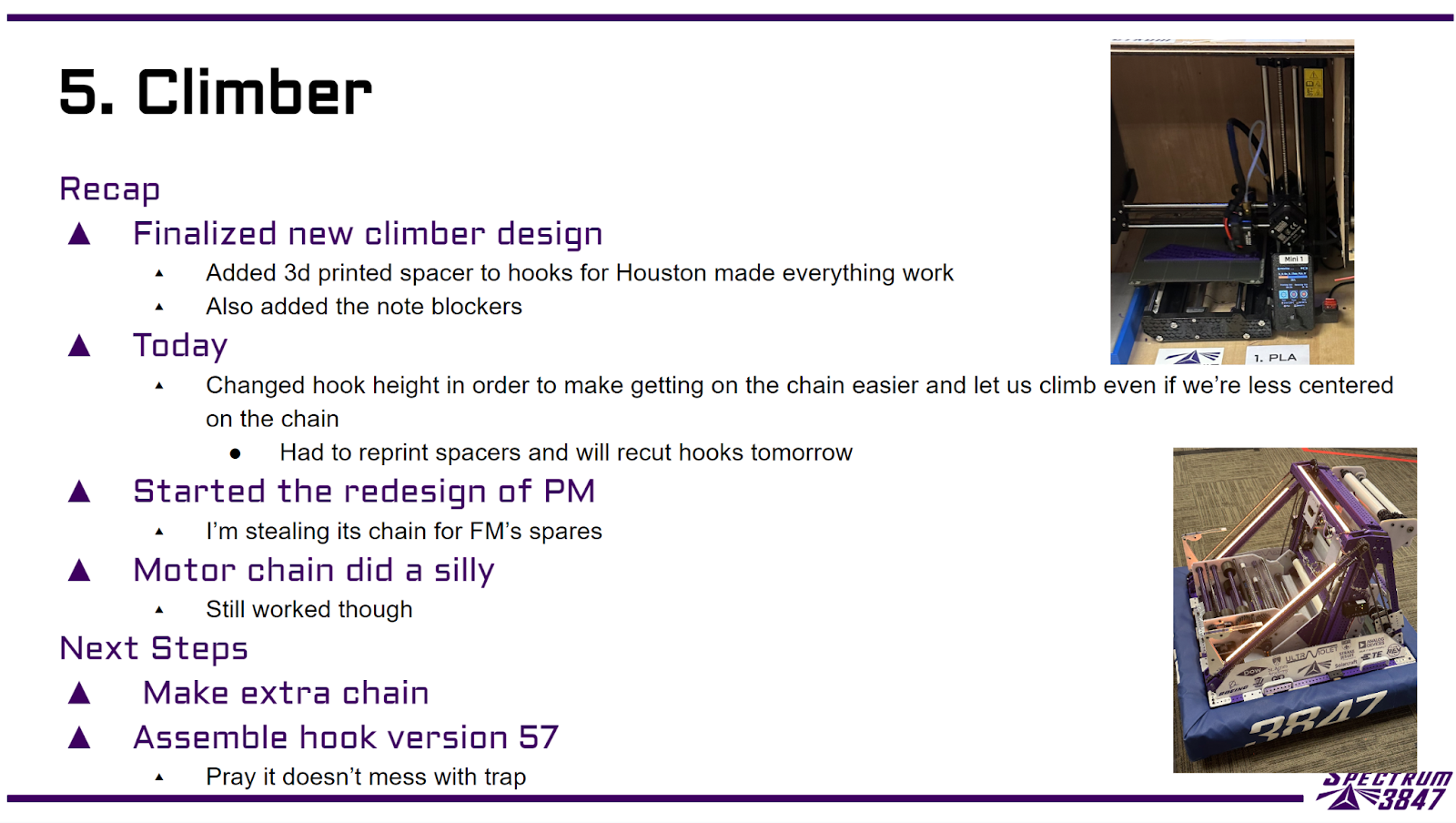
Fix: longer bolts and ensure they are tight between each match (loctite isn’t an option because of polycarb)

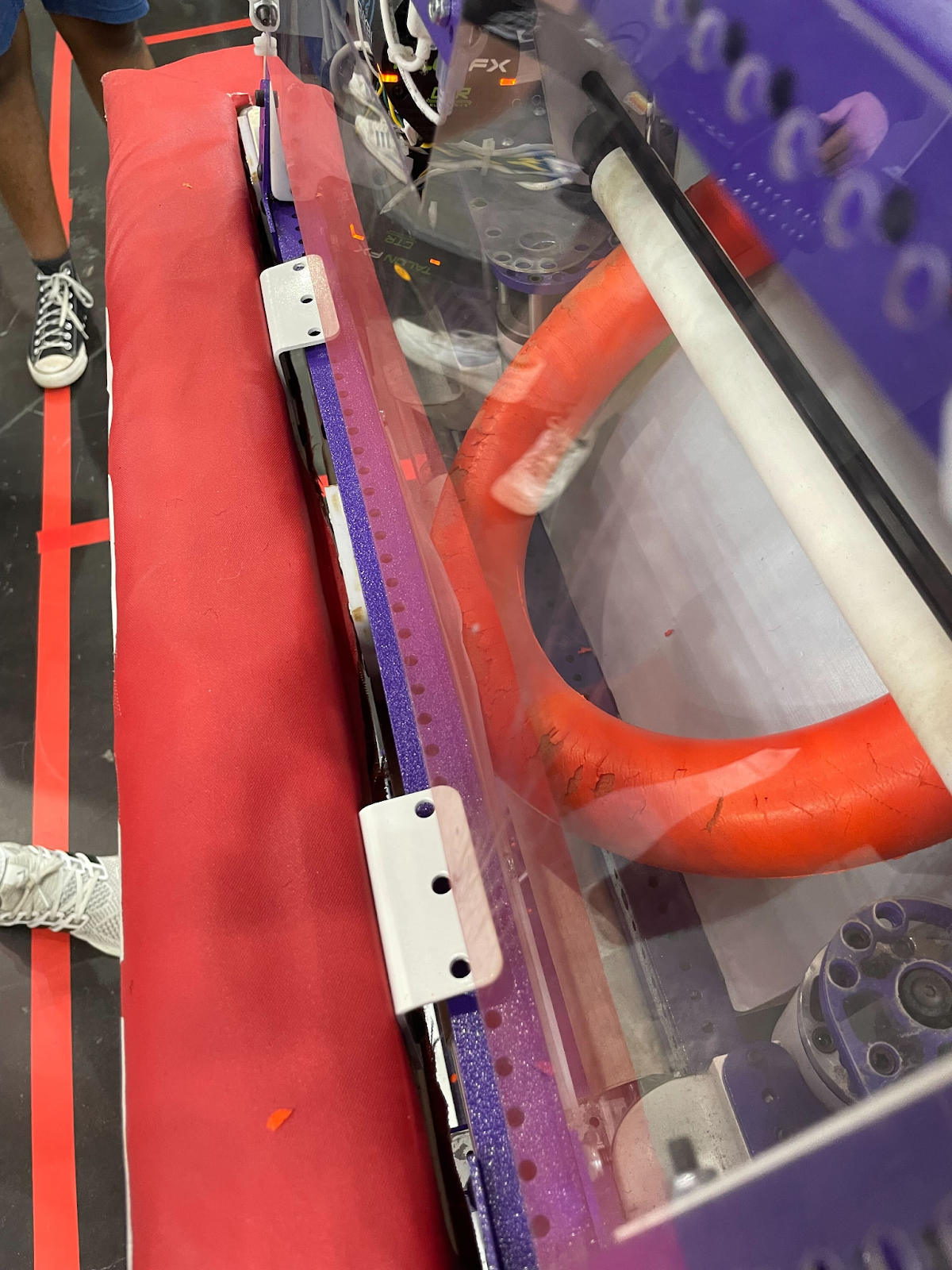
Failure: Intake stopped spinning during our practice match because debris and carpet got tangled in it in the form of a gray and orange hair ball.
Fix: check for that before every match.
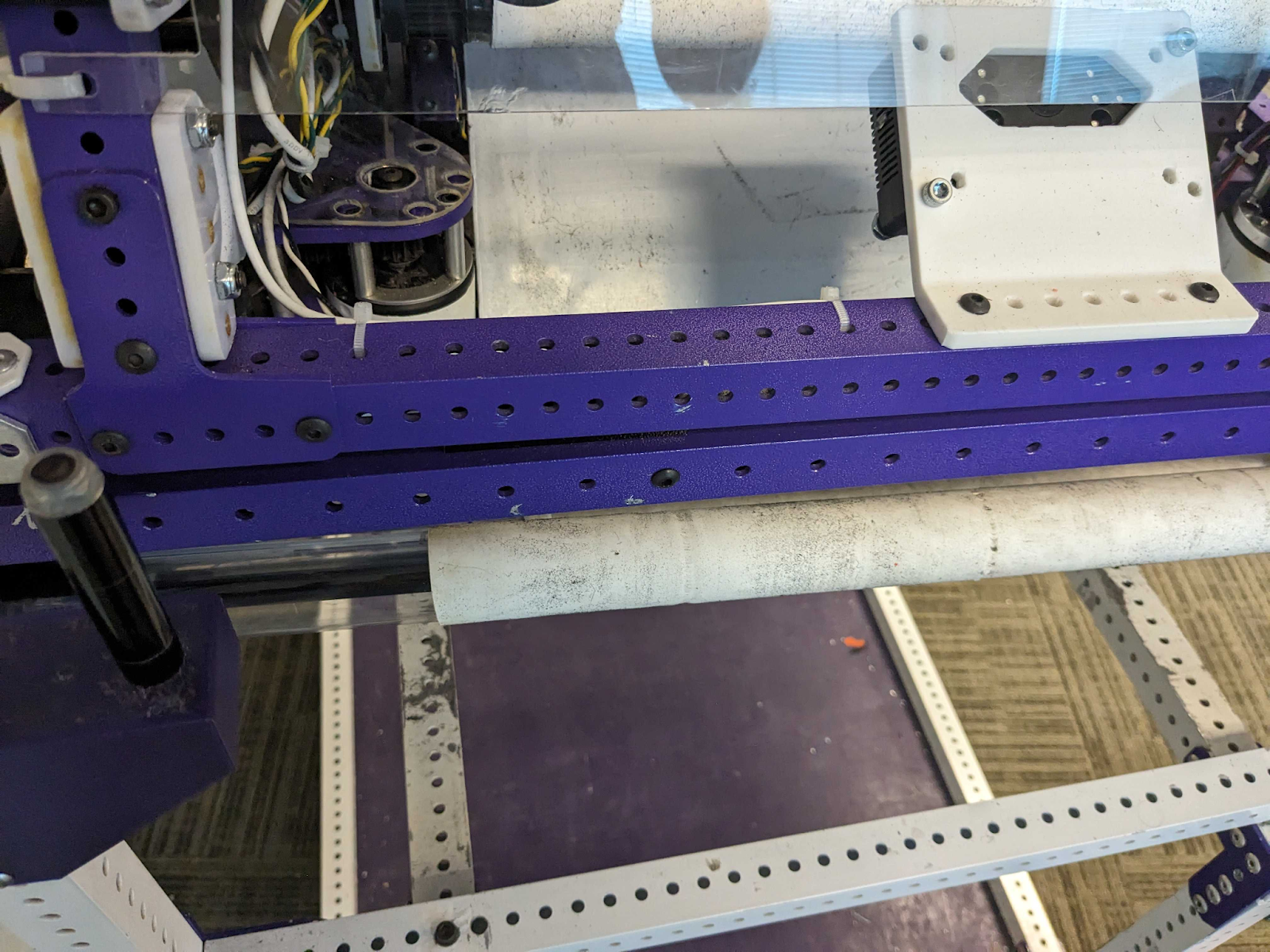
Failure: The competition fields used Batch 2 notes, which are significantly harder than Batch 1 or 3 notes. At some point, our Batch 1 notes started getting stuck in our intake during system checks. It would feed correctly if intake was pressed again. We never noticed the issue during matches.
Fix: Replaced lower frame tube.
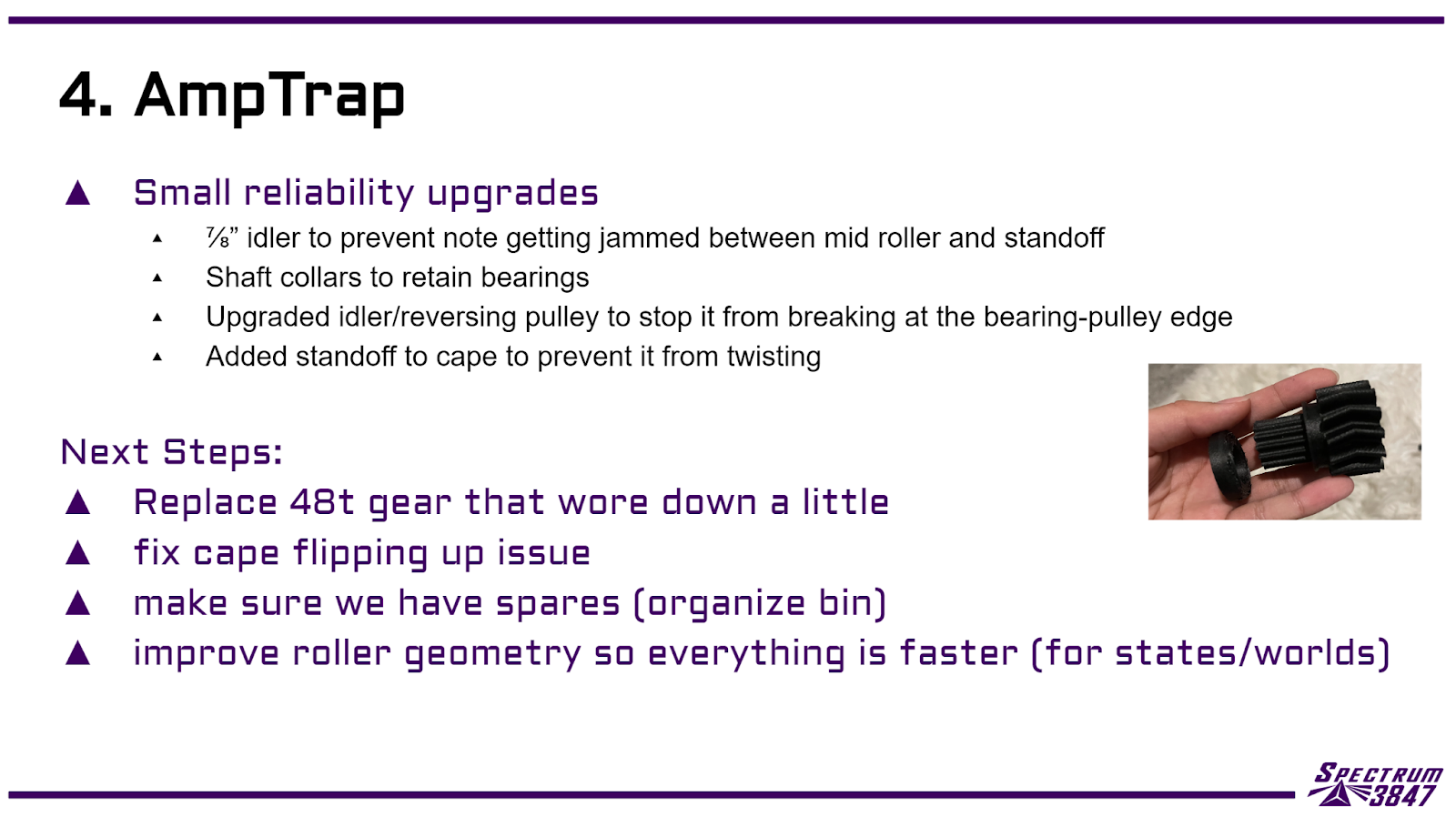
Failure: Max planetary output stage shattered during system check.
Fix: Replaced the output stage

Failure: After receiving some double defense late in the event, our indexer plate cracked, allowing the indexer motor to wiggle and slowing one or two of our feed launches.
Fix: Zip tied everything together. It worked. In the future we’ll need to replace the plate.
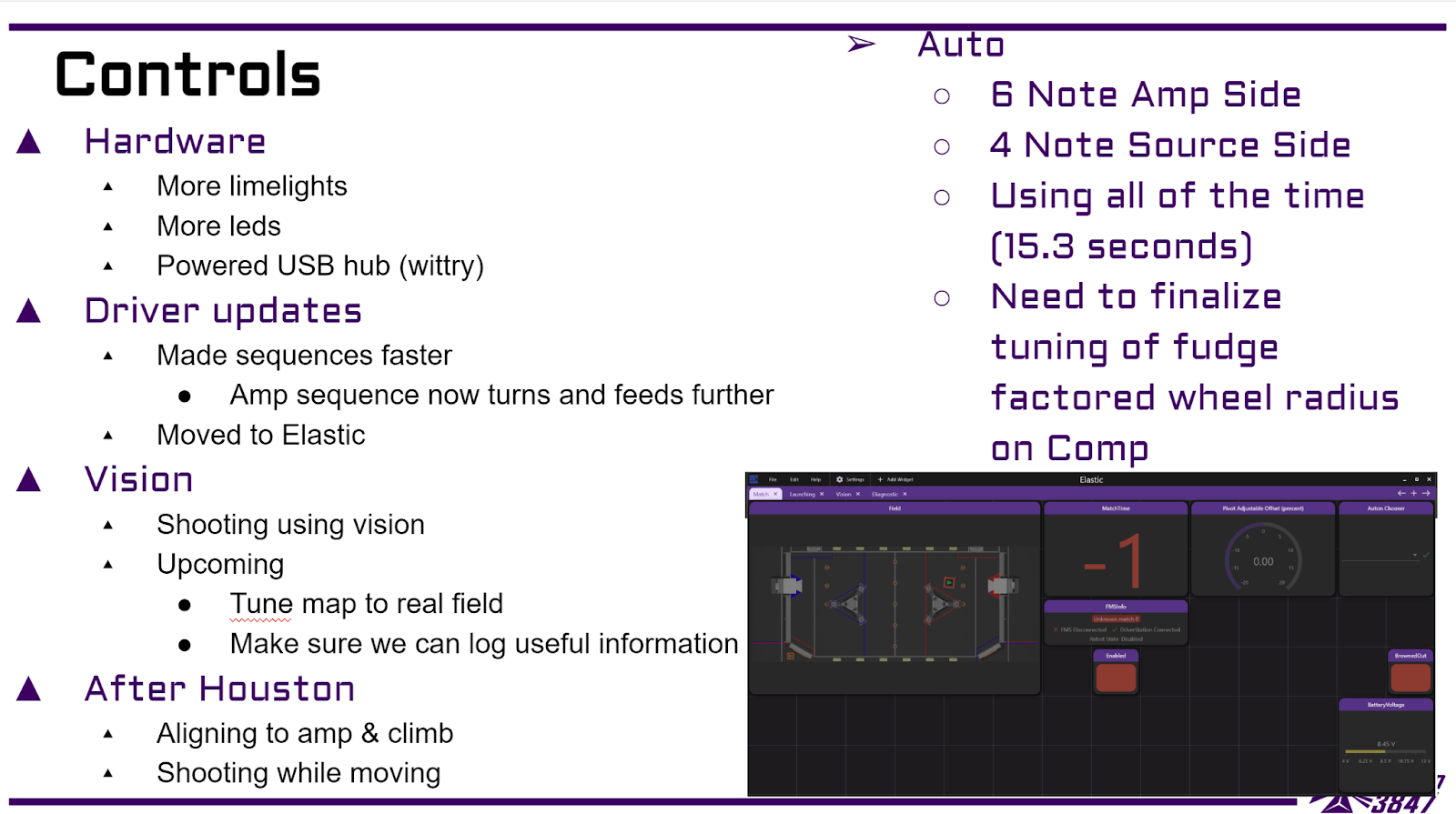
Controls
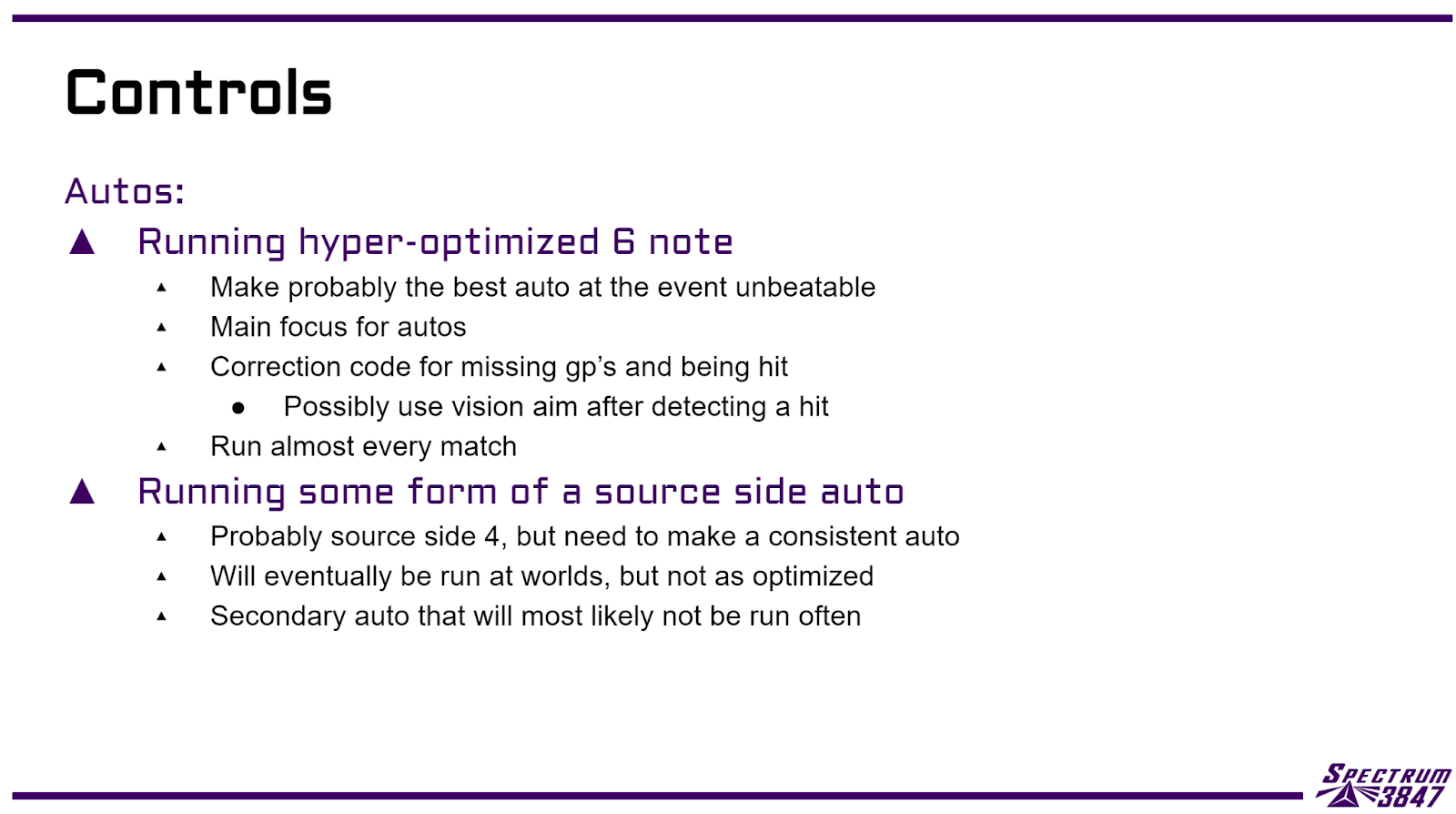
There is too much to cover when it comes to autonomous, so it will get its own dedicated post later.
During our last match we had a false positive on our LaserCAN during our trap sequence. This caused the robot to believe we had a note in the amp-trap mechanism and we climbed.
End of season
EPA rank: 22nd Worldwide, 2nd in Texas