
We have decided to follow the 1678 model of building an alpha robot. We quickly realized while testing intake prototypes that we will likely need to bolt them onto an elevator and slider to be able to fully tune them to the needed configuration and if we are going to do that we should just bolt it all to a chassis.
Alpha will be built on top of the swerve chassis from our 2022 practice robot. It will give us a chance to figure out many of the potential problems in our design and start programming and driver practice.
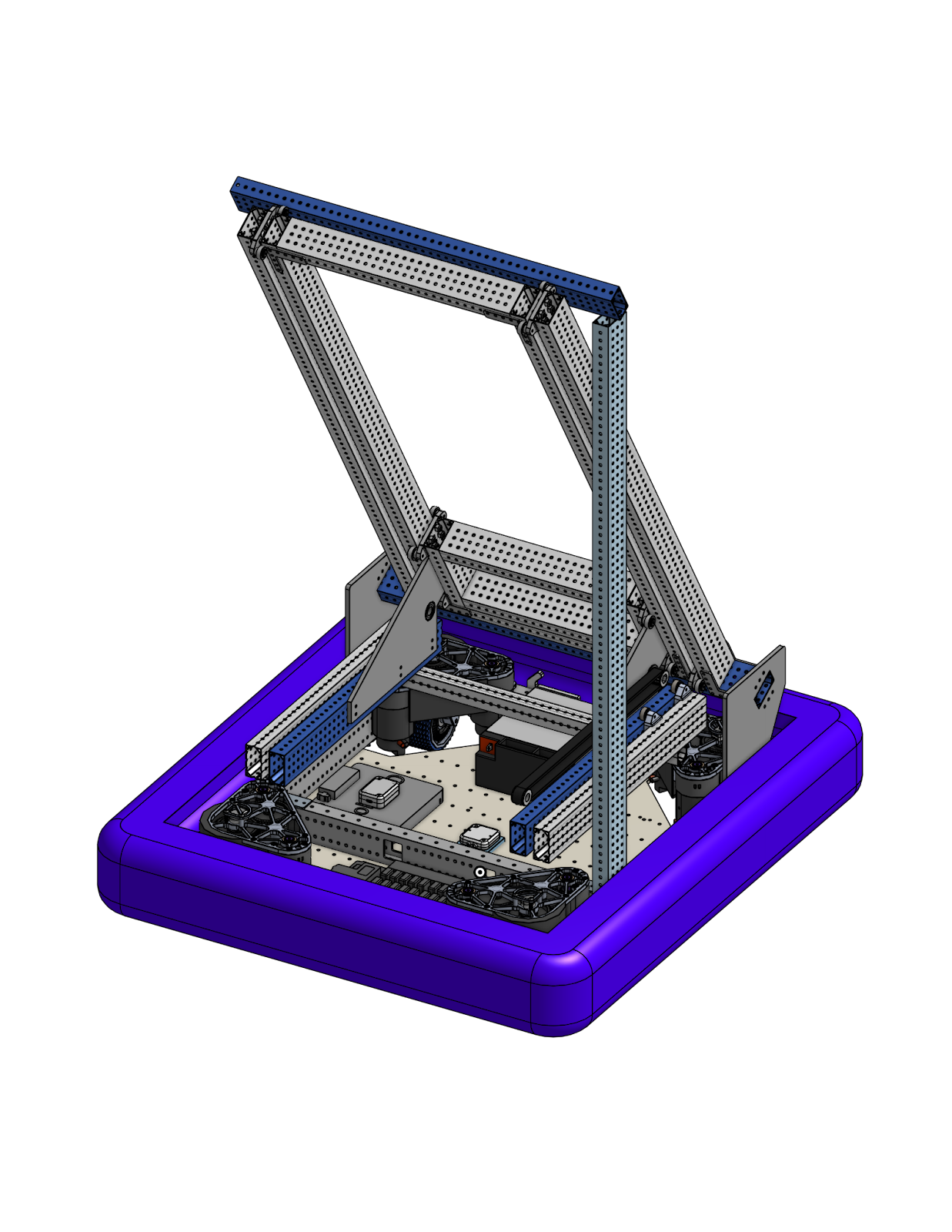
Five Mechanical Systems
Drive Train, Controls, Bumpers: MK4i 24.5” x 27.5”
Elevator: TheThriftyBot blocks for Alpha, likely continuous with a timing belt, Falcon+MAXplanetary
Slider: Basically a sideways elevator, Falcon+MAXplanetary
Intake: Pinch Roller + Falcon+Belts
Launcher: Top spin or no spin launcher (still testing): Falcon+Belts
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.