
Climber Testing
We added a crossbar between the hooks and moved our string to pull from around the lower arm pivot shaft and pull on the crossbar. This allows us to pull down closer to a straight line from the hooks to the spool. We also added some pool noodles so that if (when) this chassis falls off the bar it won't be damaged as badly.

After some more testing, we were able to get a successful climb sequence.
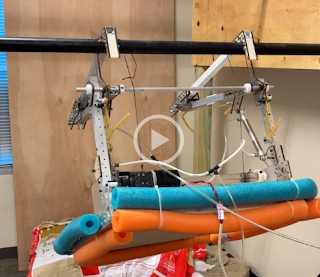
This version of the prototype doesn't currently work when we added weight (35lb plate) because it's powered with a timing belt, the competition one will likely be chain or gear driven. This climb also takes the robot to a full latch on the traversal bar which in our current design this likely brings part of our bumper above the high bar (a G108 violation) so we will only pull off the high bar and hang from the top hooks in a real match.
Launcher Prototype
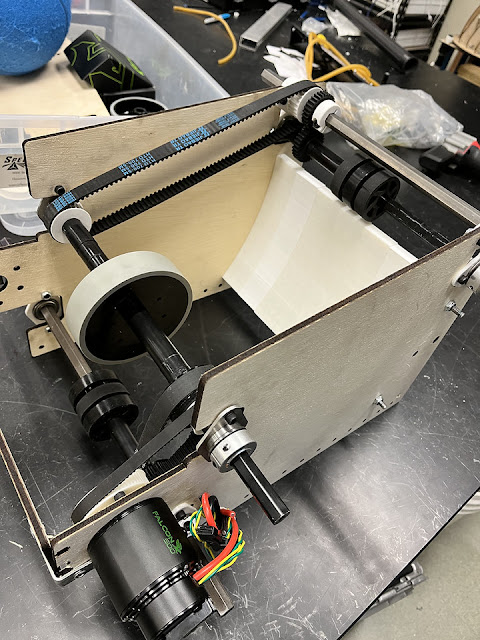
Our launcher prototype is coming along and we should have some test video coming soon. The current plan is a flywheel with a top roller, adjustable hood, and turret. If we need to reduce features they will probably keep that priority order, the turret is nice to have but not necessary, the hood could be simplified to 2 positions instead of continuous, and the top roller should allow us to launch balls into the goals with less energy in the ball when they enter to reduce bounce-outs.
- Spectrum
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.