
Today was our first day back in class from winter break. We were able to get some more testing done and sketched through some new ideas.
Intake Tests
We worked on testing a narrow intake. There isn’t a lot of room between the swerve modules for an intake so we wanted to make sure we could compress the note to an oval as we intake and it looks very possible. This intake in the video is 9 inches wide between the printed wedges on the side.

A progression of climber tests
We were able to test a climber concept with an elevator to pull down on the chain and a pair of “sticks” to stop us from twisting on the wall. We tested various features to see how they would work in this setup.
No Roller

Passive Roller - Low on the Stage Wall
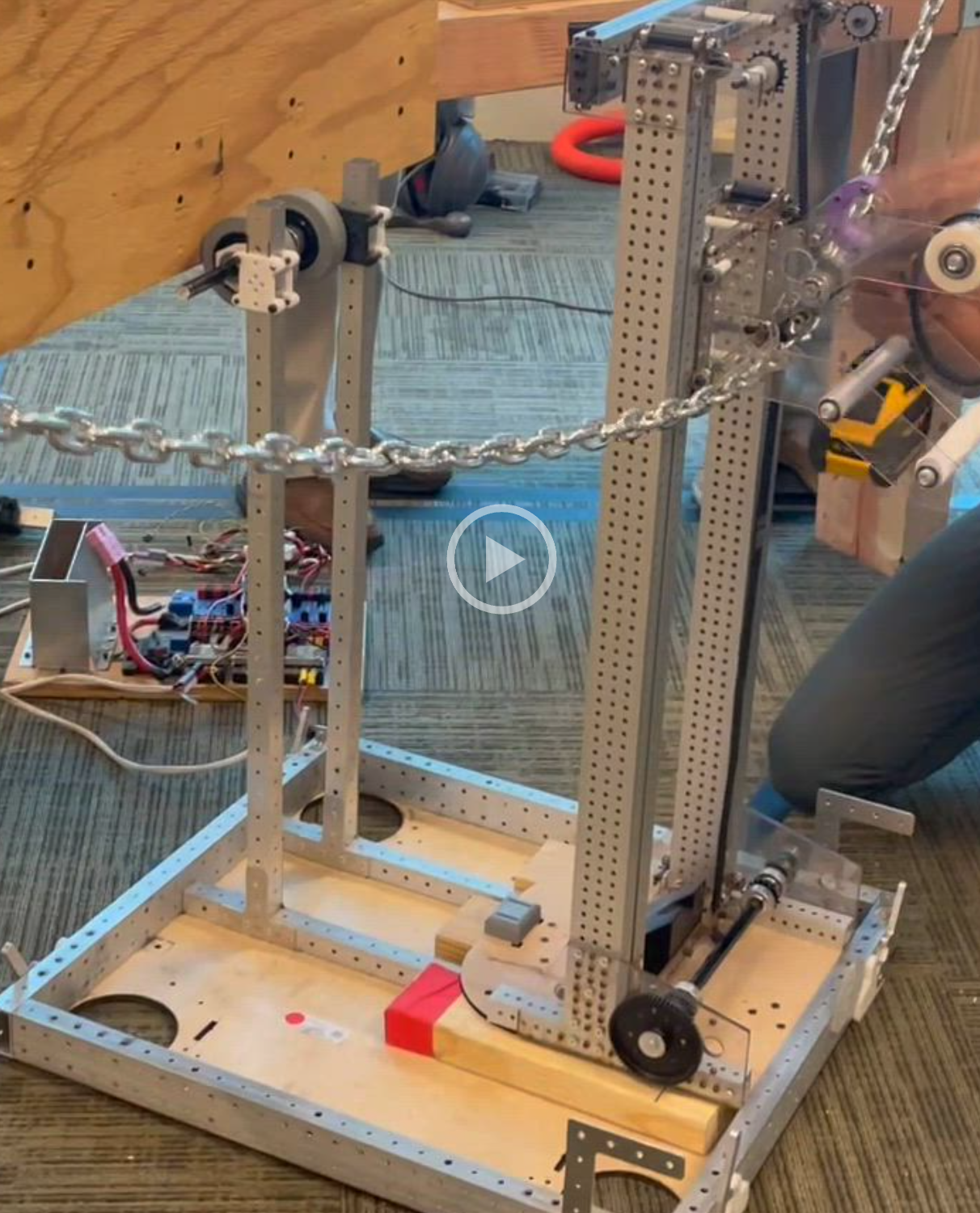
Powered Roller - Low on the Stage Wall (I forgot to tension the belt)
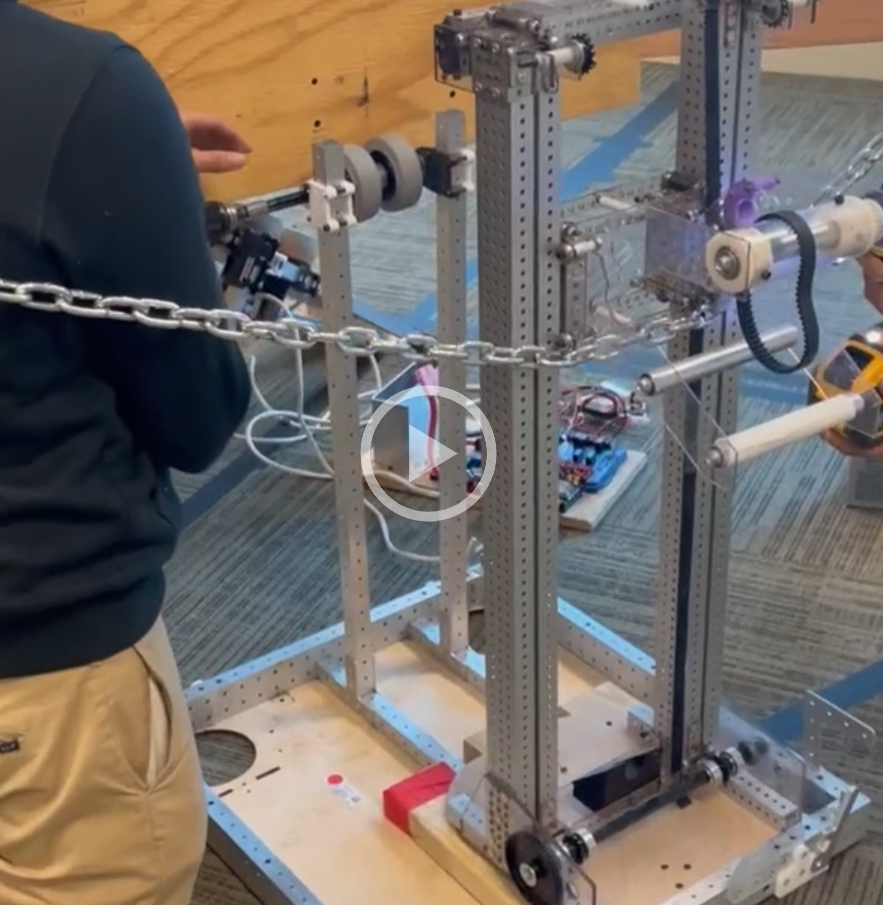
High Passive Roller
We don’t currently have a video of the successful unweighted test (it hasn’t been uploaded yet by a student) but you can see in this clip that the robot does start to want to climb the wall before succumbing to the fact it was a hastily built prototype on top of a chassis we were going to discard before the build season. (It’s missing many of its rivets and gussets).
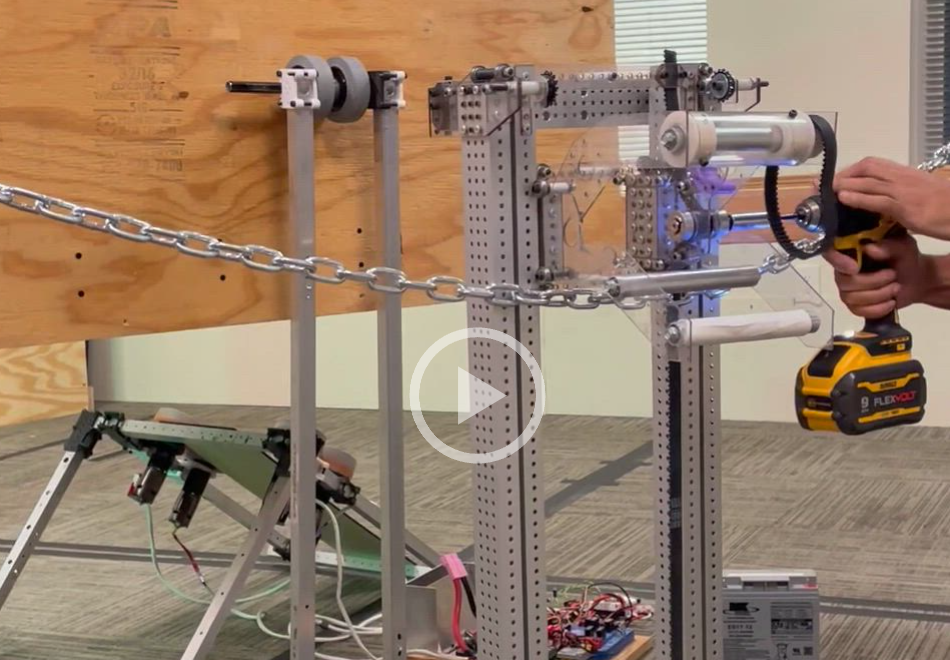
We’ll repair it tomorrow and get some tests done with a powered roller and the weighted plate and see if that works as well.
New main design path
As we were working through the geometry of a tilting launcher+feeder on an elevator we realized that we needed to be able to move the launcher a little further back from the elevator/pivot so that when we tip up it pushes forward towards the amp and trap. That also lets us get a little more length and shooting from further back in your robot is largely a good thing if there is a defender. As we extended it further and further we realized the robot started to resemble the Ri3D robot from Unqualified Quokkas with a long arm and angled feeder+launcher. This afternoon we were able to make a sketch and Krayon CAD of a robot that doesn’t have an elevator but is still able to reach high enough to score in the amp and that with a reasonable climb can put the note into the trap.
Looking at another person’s robot sketches is often like trying to read a foreign language but the basic idea is the box is our launcher+feeder it gets notes from the underbumper floor intake. It tilts up to launch into the speaker and tilts to the black box position to launch down into the amp or down into the trap once we raise 20”+ on the stage.
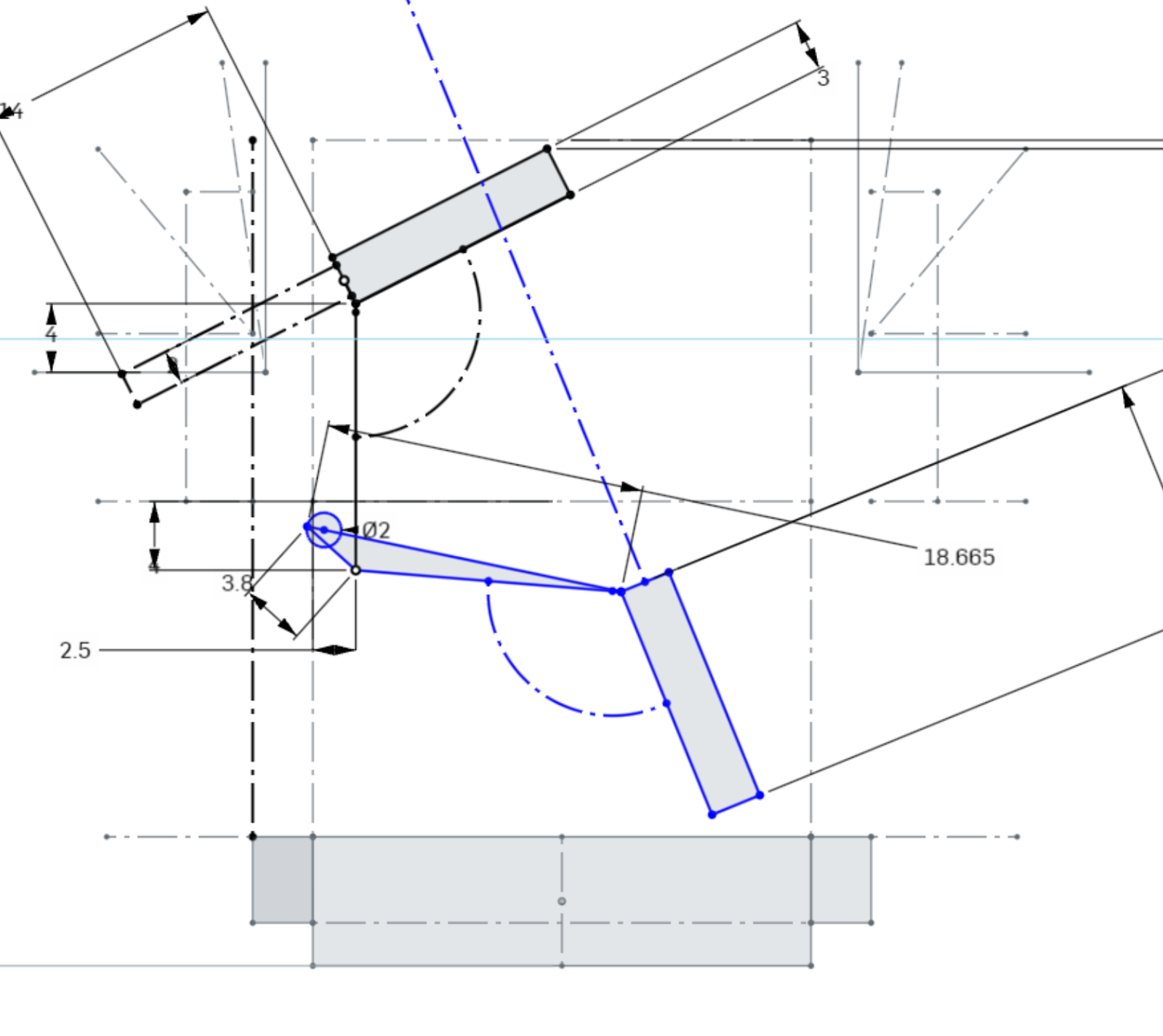
We also did a quick KrayonCAD
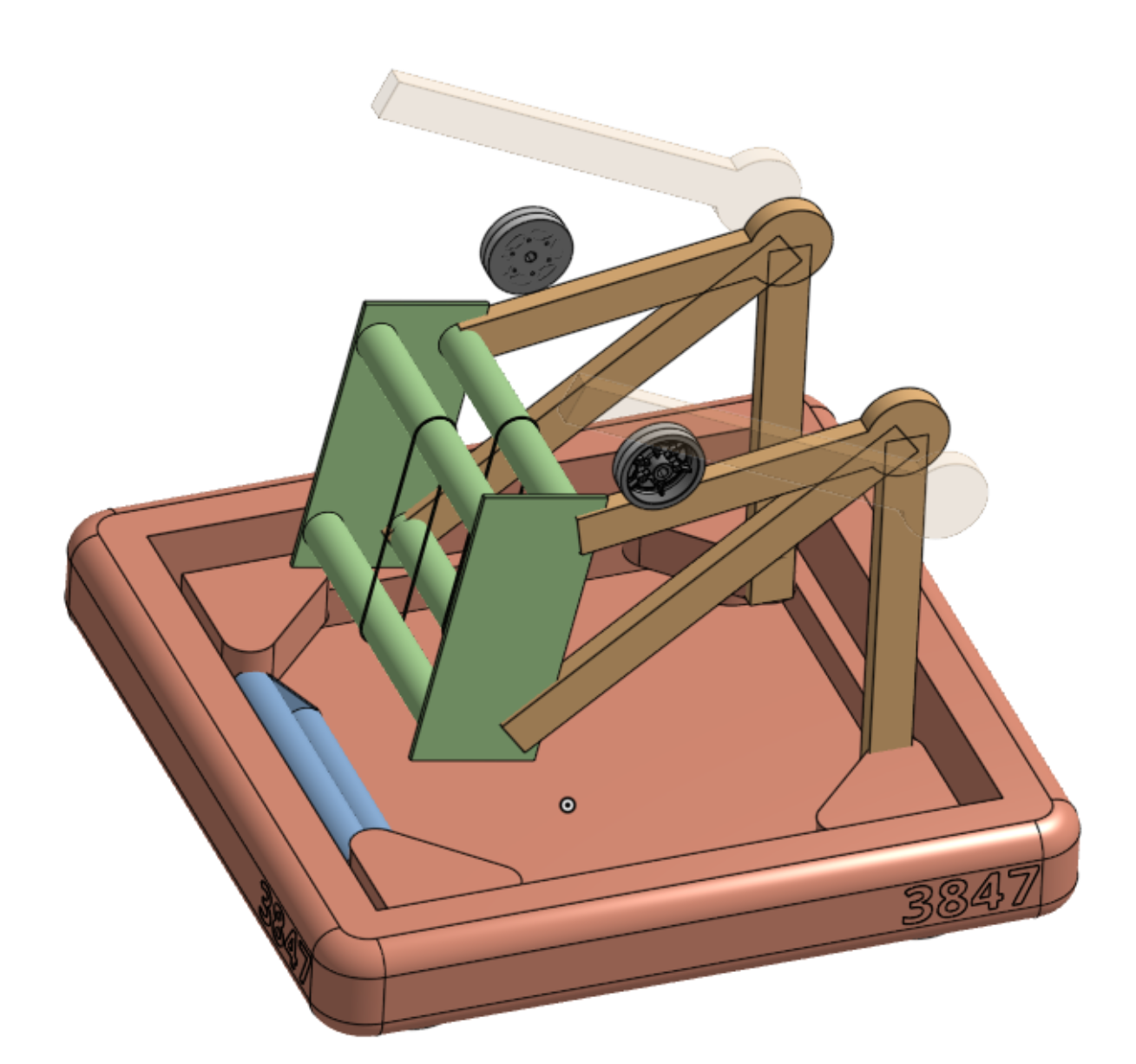
- Blue = under-bumper intake
- Green = Feeder+Launcher
- Yellow arms = pivot to launch/amp angle and react against the stage wall for the climb
- Wheels = drive up the stage wall
- Transparent arms = climb arms: grab the chain and pull it down to almost touch our bumpers.
We still have a lot more testing to do on this concept but it meets a large amount of our design goals. We are working on ways to effectively feed this robot from the source directly instead of only using the ground intake. This design is limited by needing to wait till out from under the stage before it tilts up its launcher to aim at the speaker. The advantages are it doesn’t have any linear motion, only rotary joints which are pretty easy to build robustly and control.
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.