
With our field elements complete we spent today building a few prototypes and testing them.
Note Roller Testing
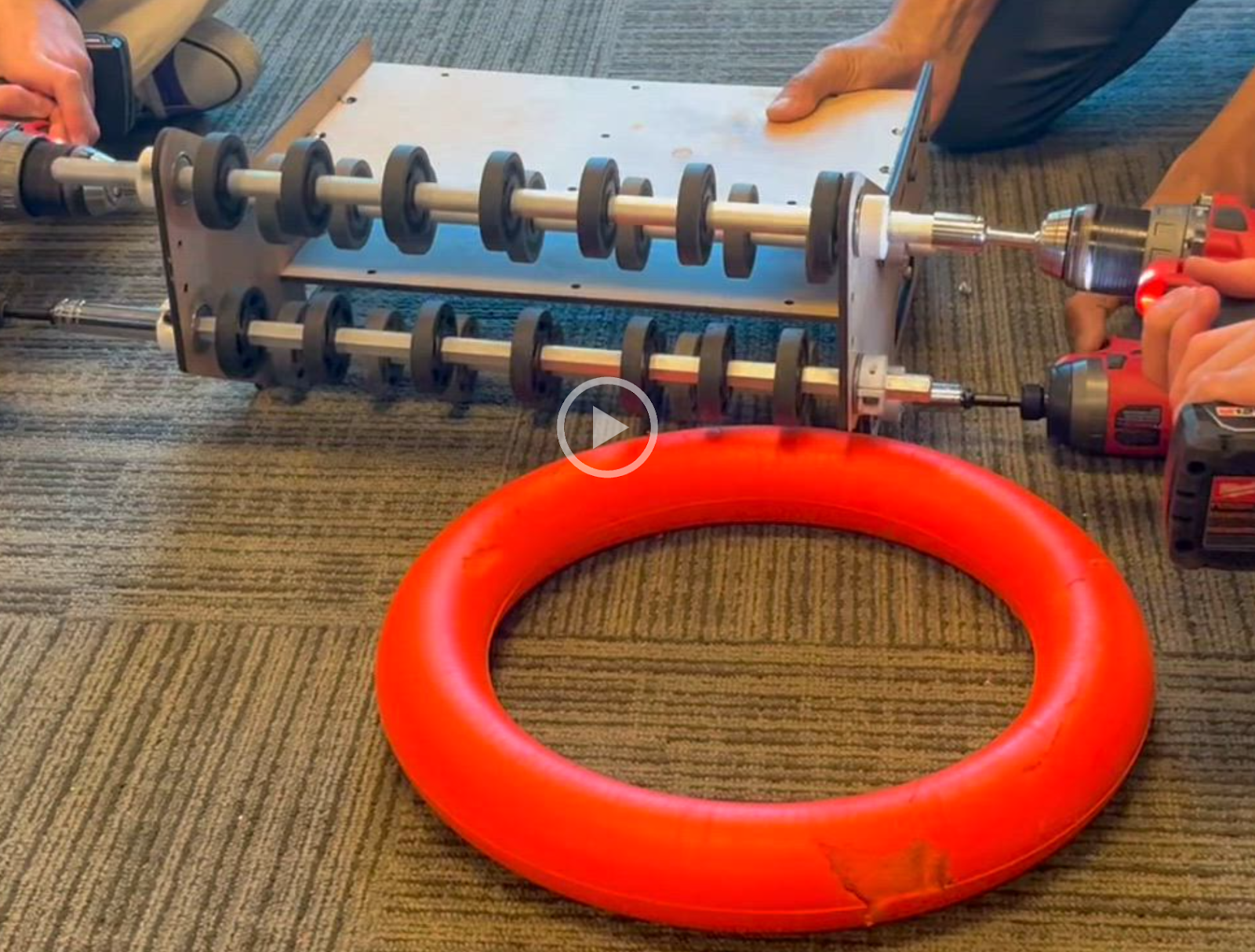
We built a simple test platform to test how the note interacts with rollers. We wanted to see how easily we could route the note in any direction we wanted and do some simple ground intake tests. We also built to test different scoring options for the amp, and trap.
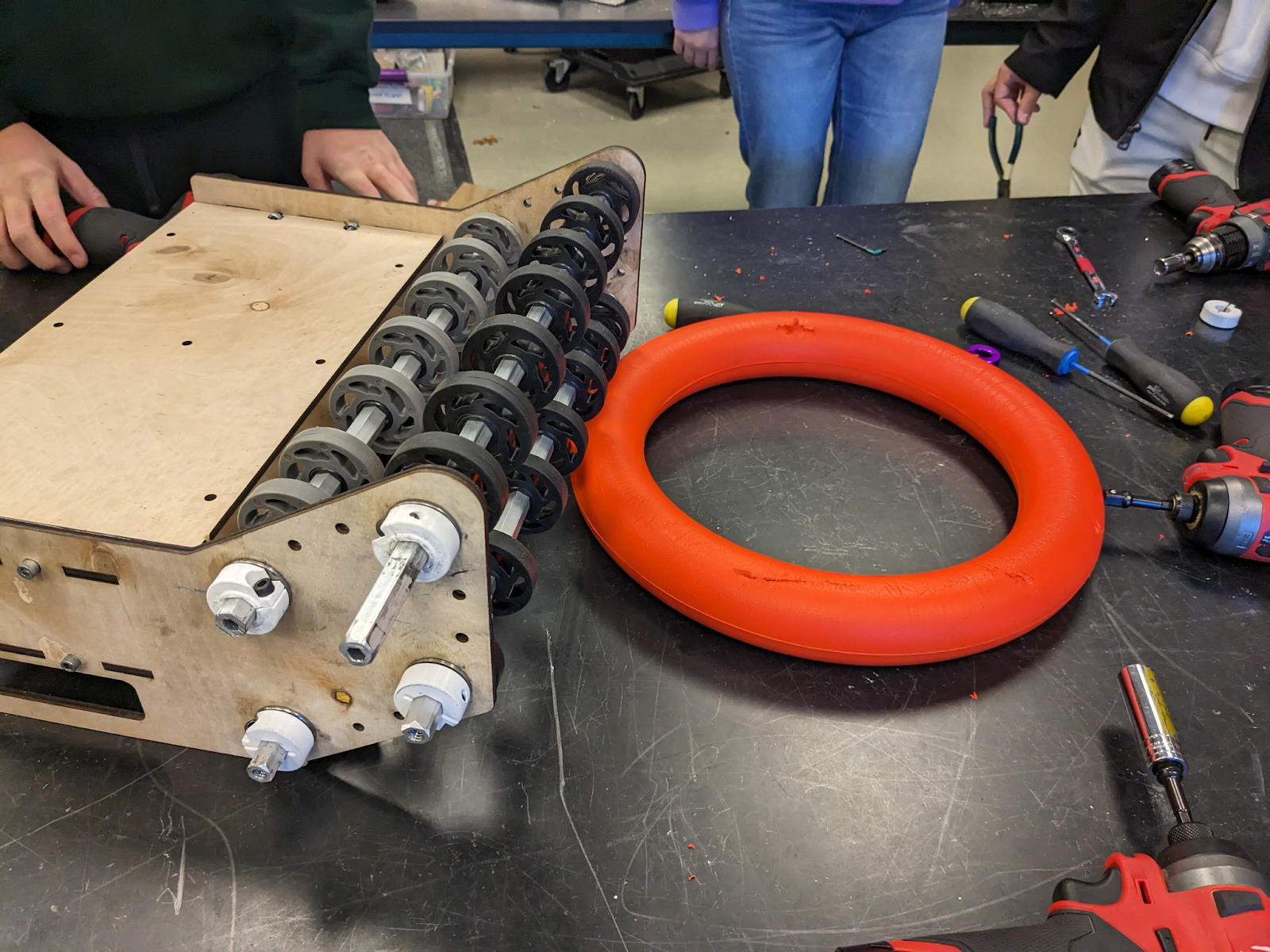
Ground Intake
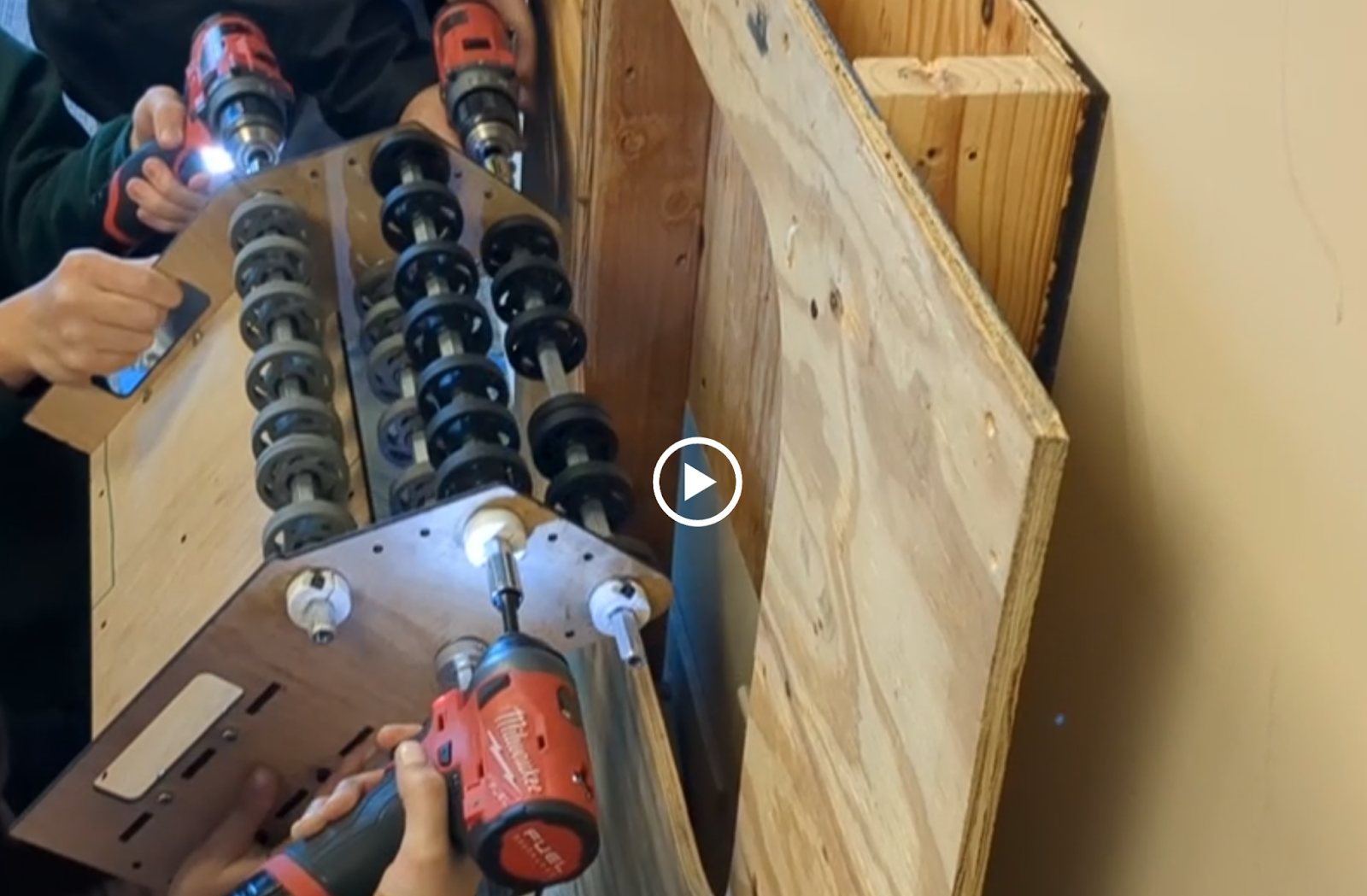
We used it as a ground intake test platform. This was very successful, the note is able to pop up the 2” roller easily and go into the slot, vertical, or 180 deg over the roller depending on how we spin the wheels.
Video
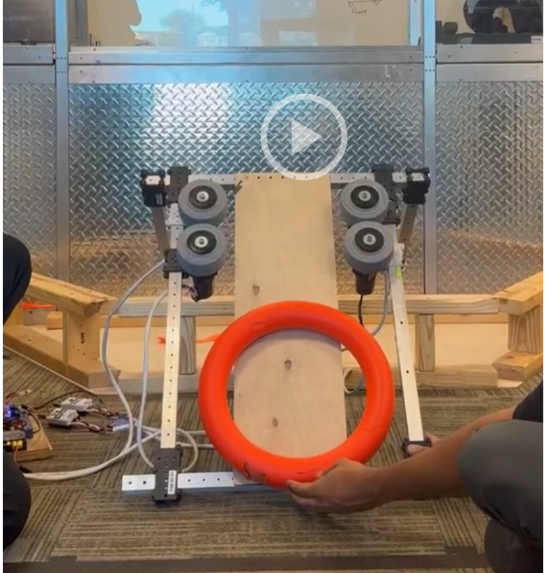
Amp
We were able to use the note roller to test scoring in the Amp from a low angle. This worked very easily.

Trap
We were able to use the note roller mechanism to test scoring in the trap as well. The trap door is fairly similar to the real field, it has 2.8 lbs of steel at a similar location to the real field, and it’s made of ¼” polycarb at the field dimensions (minus the microphone cutout at the top). It has the same distance backstop as the field. It doesn’t include the actual basket to catch the note like the field has.


Note Roller Conclusions
The note is very forgiving to spacing, roller softness, etc. It will follow the travel of most any wheel/roller that it contacts and easily go around tight curves. It’s a very nice game piece for moving around your robot in different ways.
Launcher
We built a quick launcher test fixture out of our prototyping blocks and some old wheels, motors, and gearboxes. We use a test bed with a PDB, main breaker, speed controllers, and PWM signal generator to control multiple motors at once.
This specific version was for us to get some quick in-person experience of how the note flies. We will improve the prototype to begin to work on accuracy and design specifics such as wheel type, compression, etc.
Climb
This wasn’t so much a prototype as just a test. We had an old chassis that we hung from the chain to see how the CG effects a holding position up near the trap.

More Videos
There are more videos and photos of our prototypes and testing in our gallery - https://photos.spectrum3847.org/2024-FRC/2024-Build-Season
Design Recap
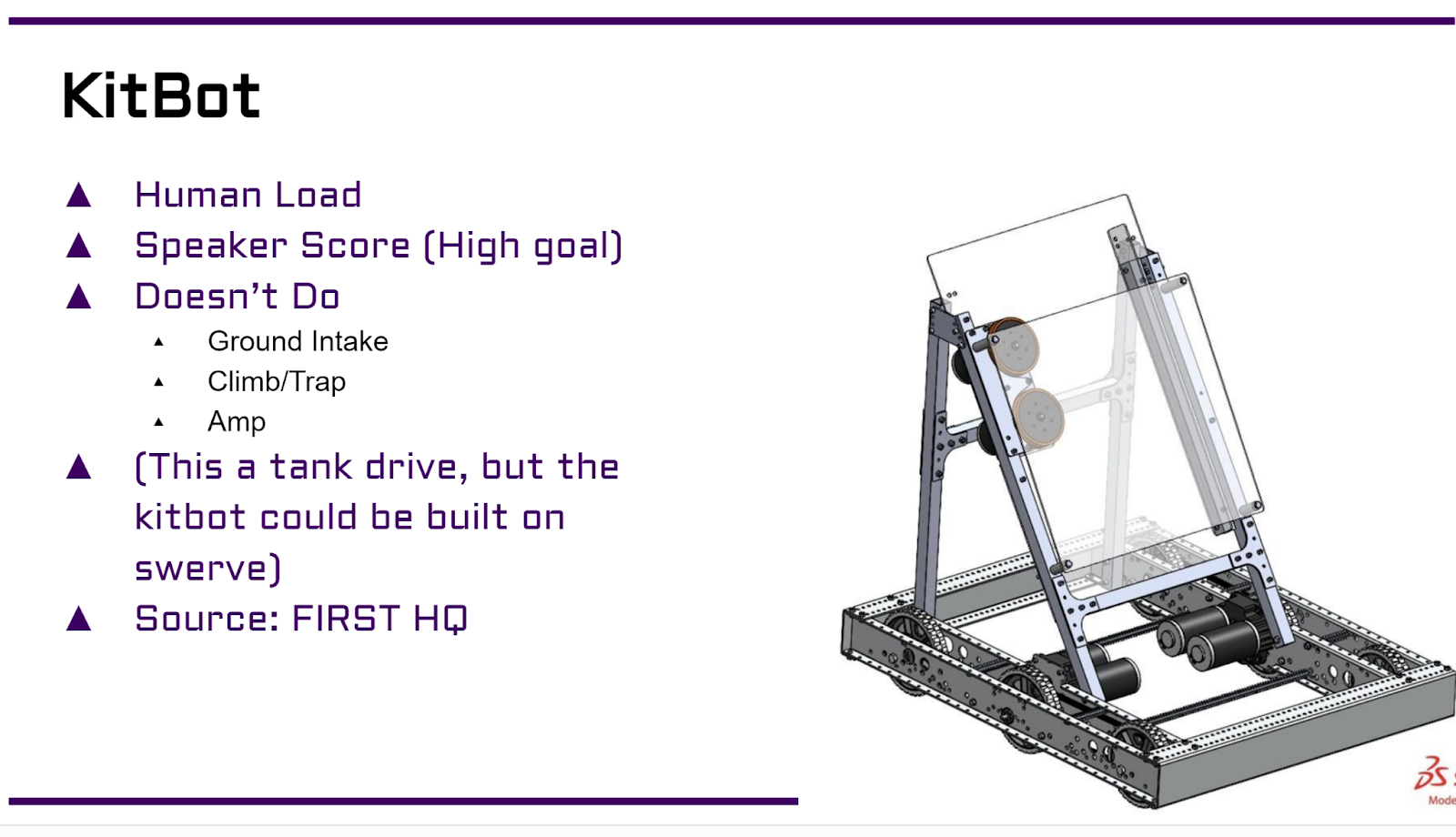
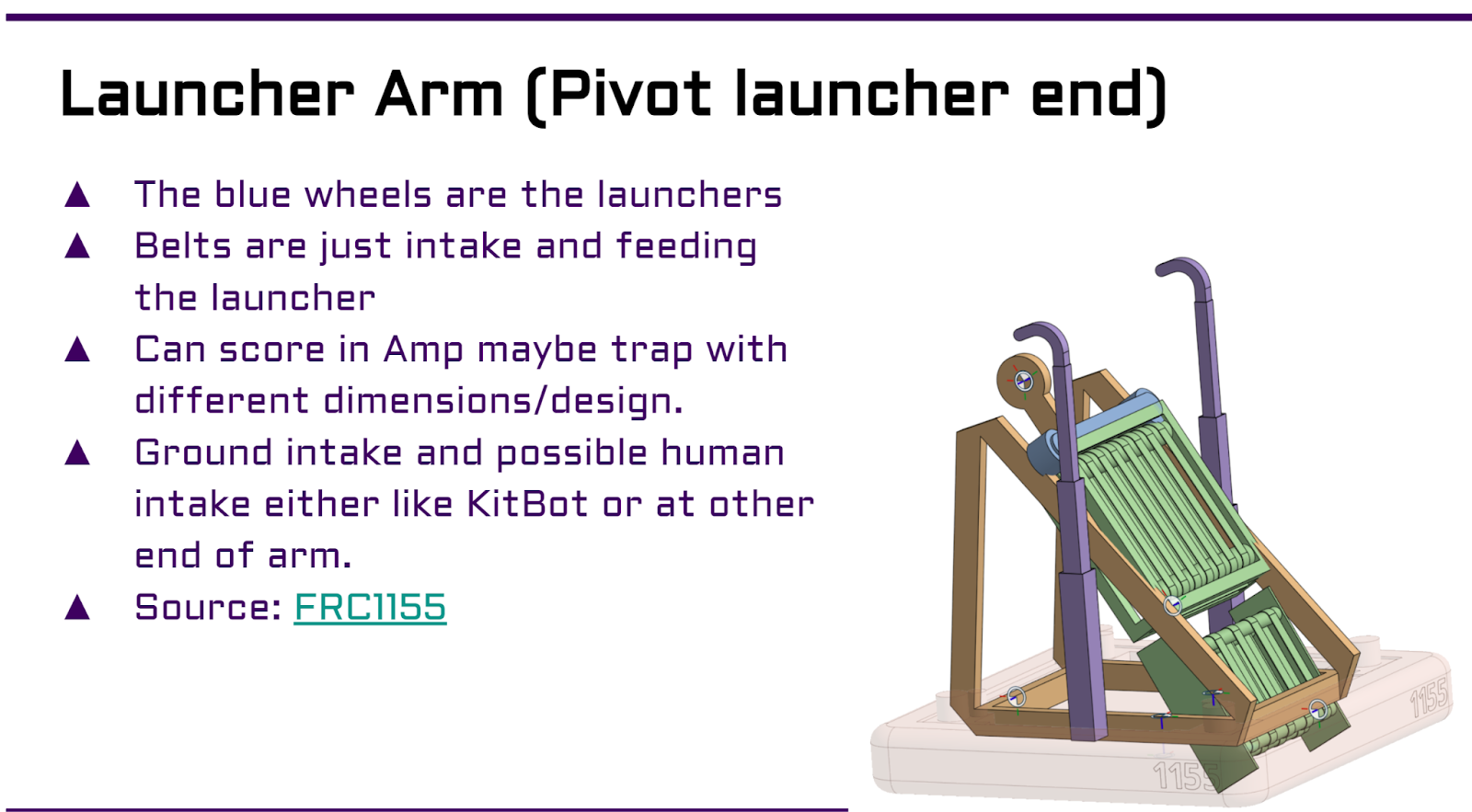
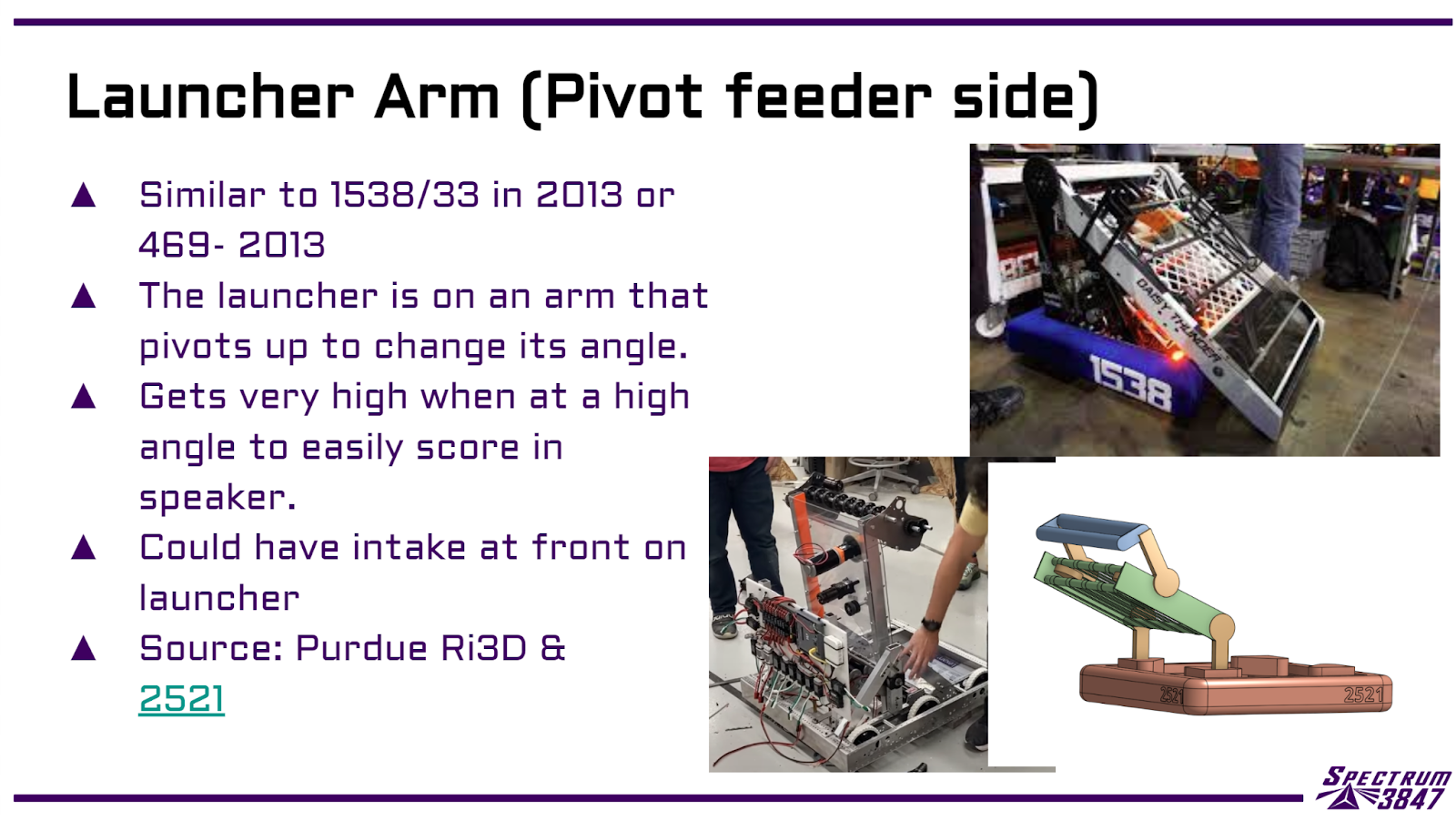
We listed out some various robot types we have seen, sketched, talked about, etc. The slides are linked with their source for current year designs.
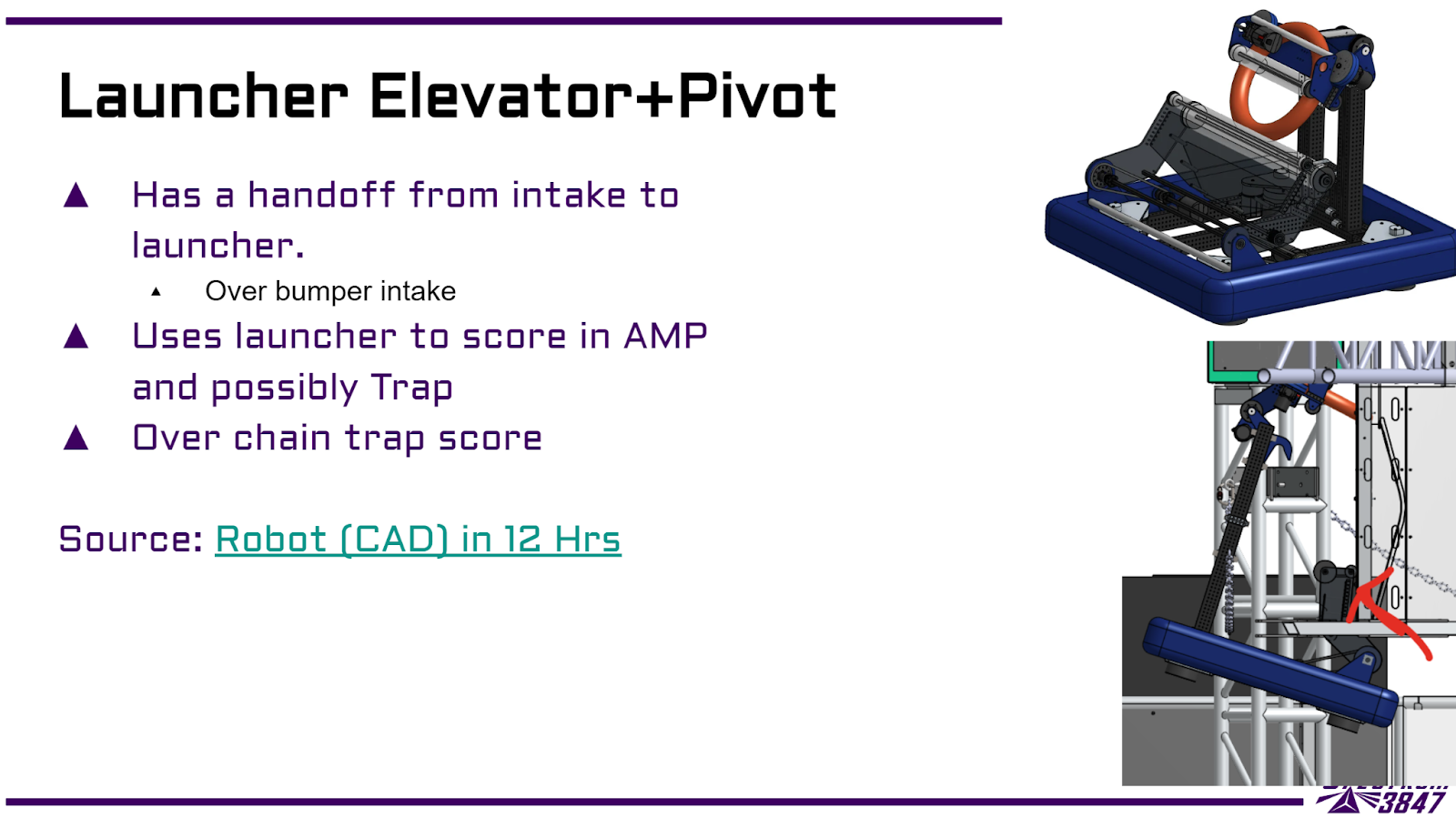
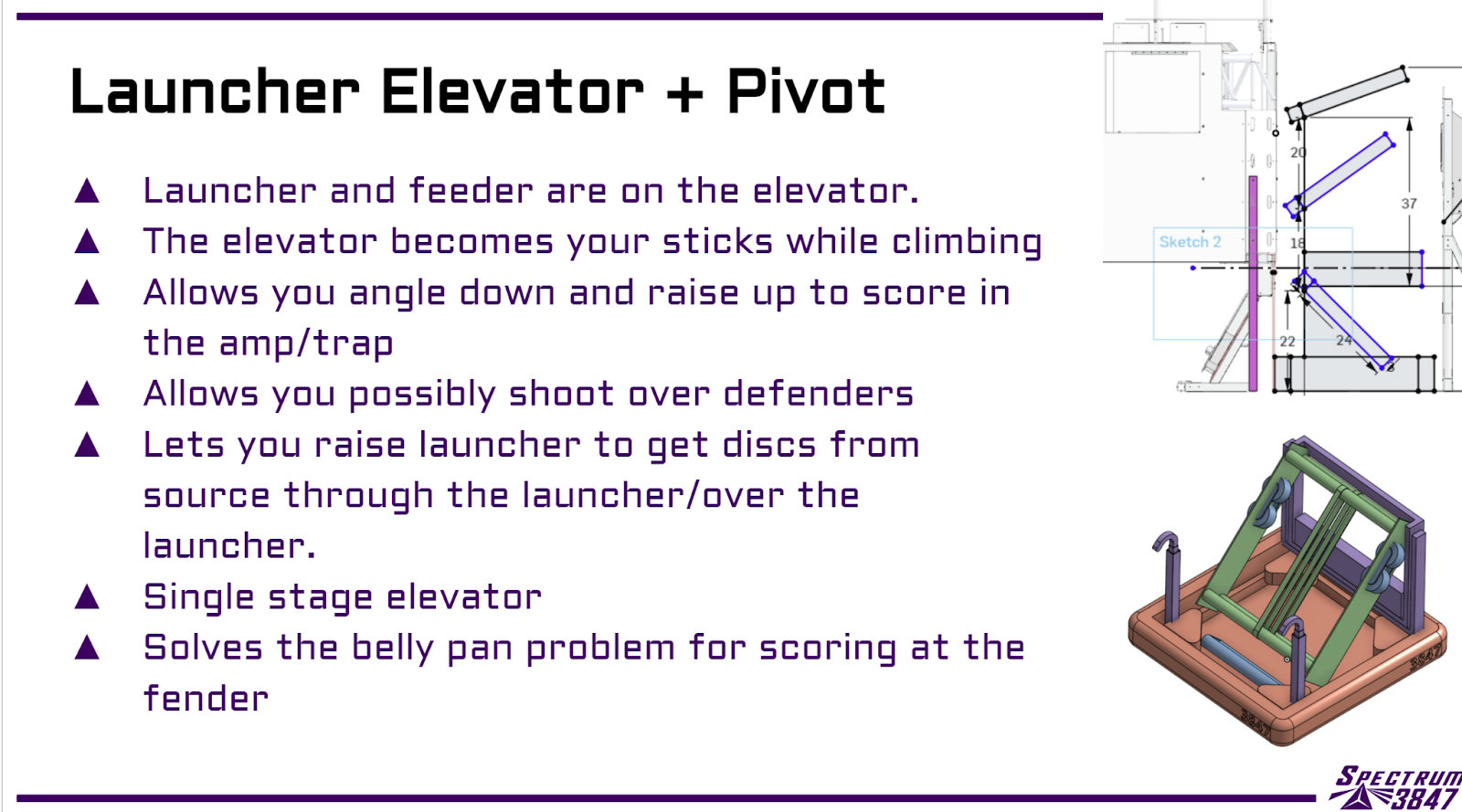
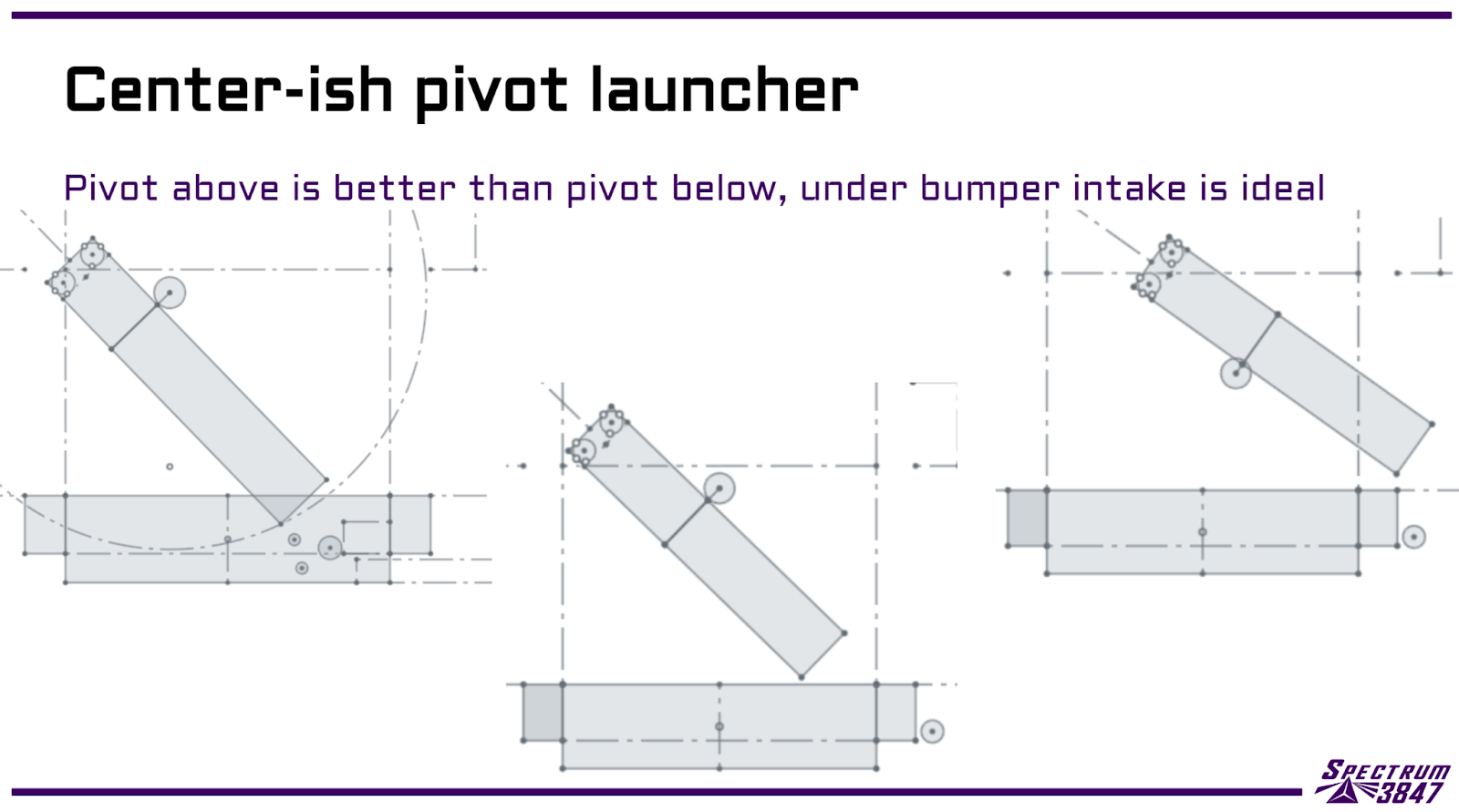
We are currently leaning towards a launcher elevator+pivot robot type, it would use its adjustable angle launcher and elevator to score in the amp and then the trap once it’s climbed.
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.