
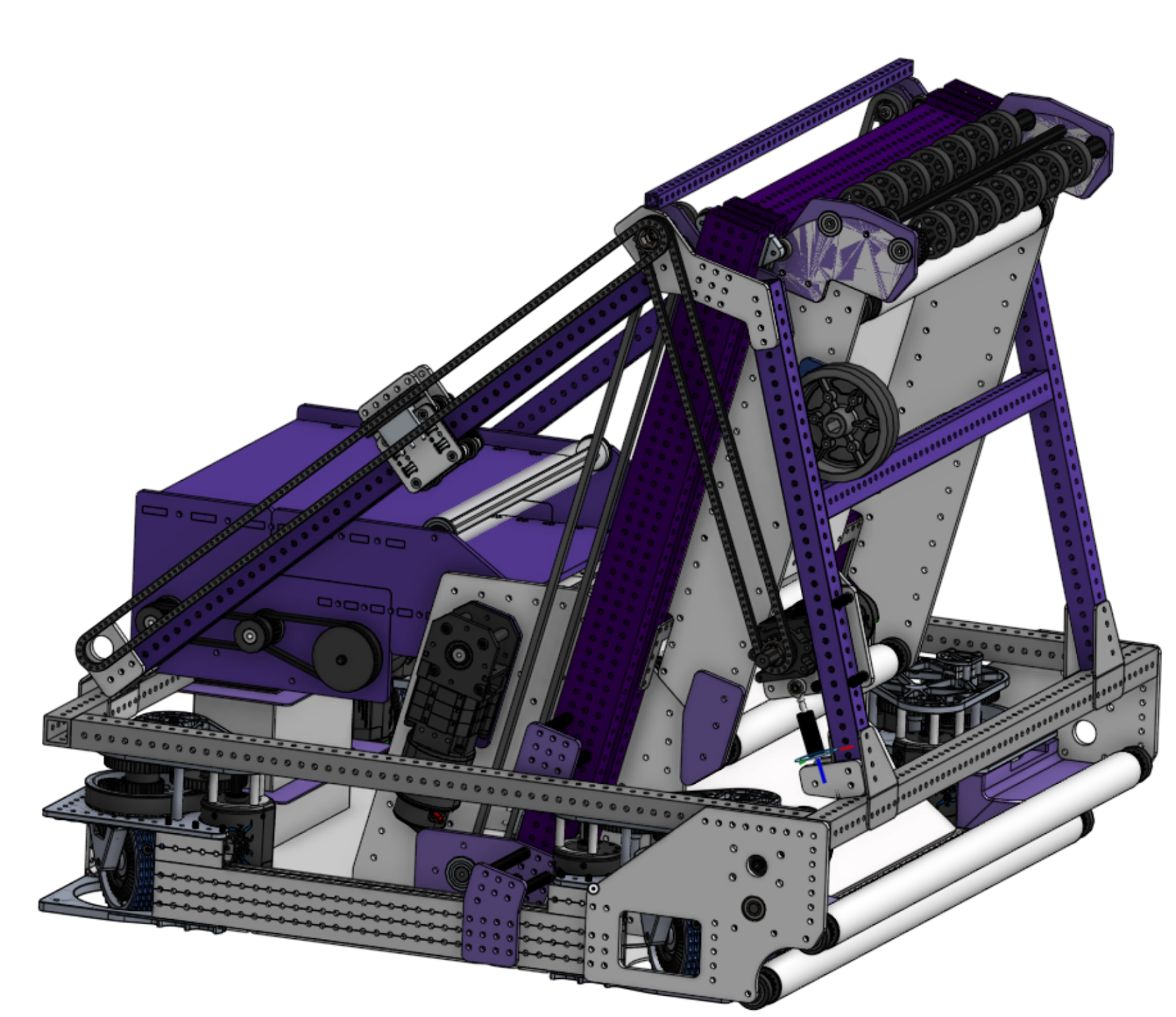
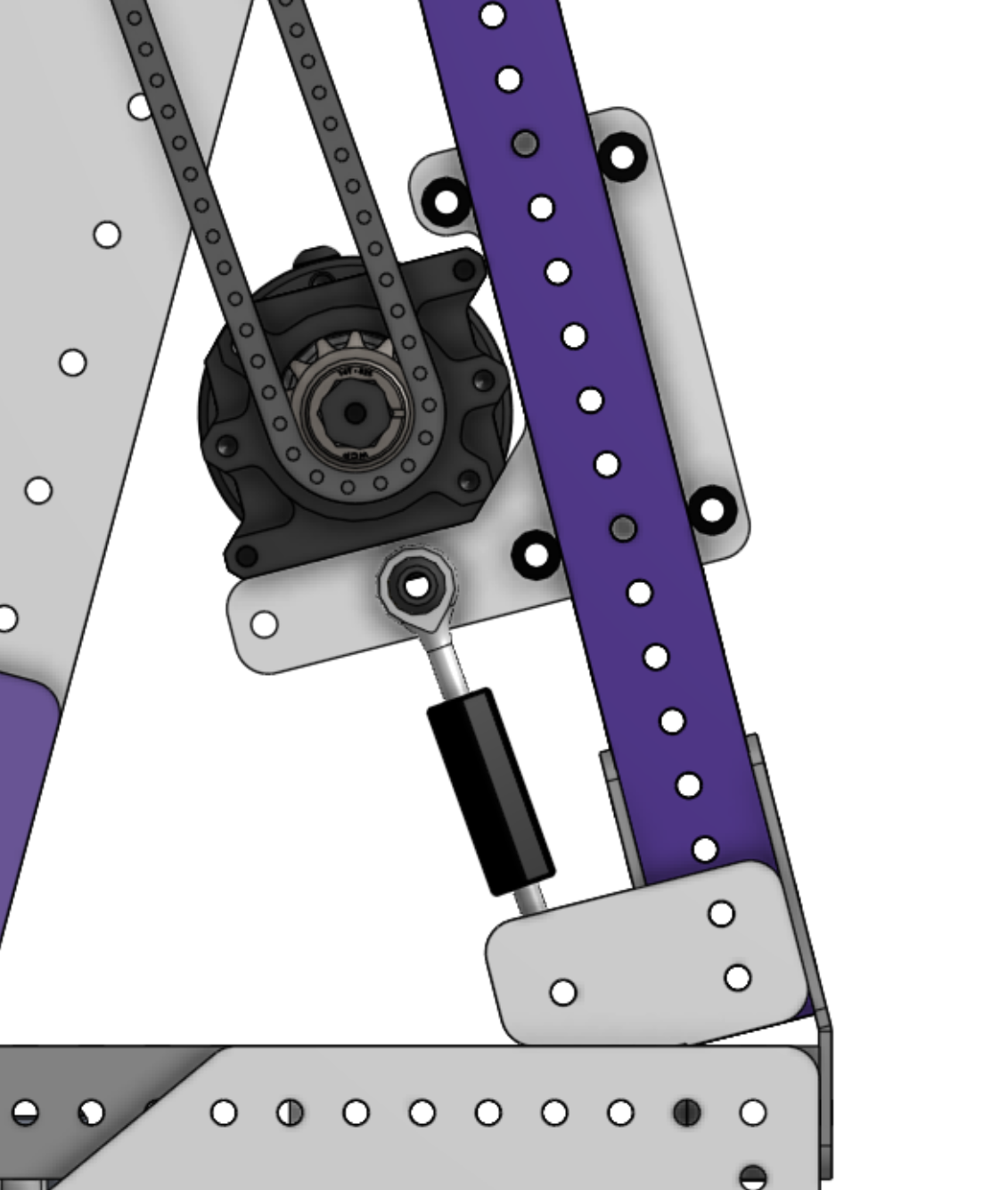
Alpha Robot
The alpha robot CAD has a more complete climber. We will be powering the slide climb (it will have hooks for the chain) from a MaxPlanetary at the rear of the robot that we will tension with a turnbuckle to slide it down the tube it is mounted on. The turnbuckle will be made from REV 10-32 Ball Joints and a hex shaft. The top sprockets of the slide chain and elevator chain will be coaxial with the elevator top sprockets spinning on bushing on the ⅜” hex shaft that will connect the two sides.
Competition Robot CAD
We have begun CAD for the competition robot. It will look very similar to the alpha in many ways. The process of re-CAD many of the mechanisms allows us the chance to redo our CAD with more knowledge. This means that things can be better organized as we have a better idea of what mechanisms and parts will be where, so our assemblies and part studios can be easier to work on. The spacing and dimensions can be cleaner for all the parts. Some of the systems will get major upgrades.
Here is the current SuperSketch of the robot.
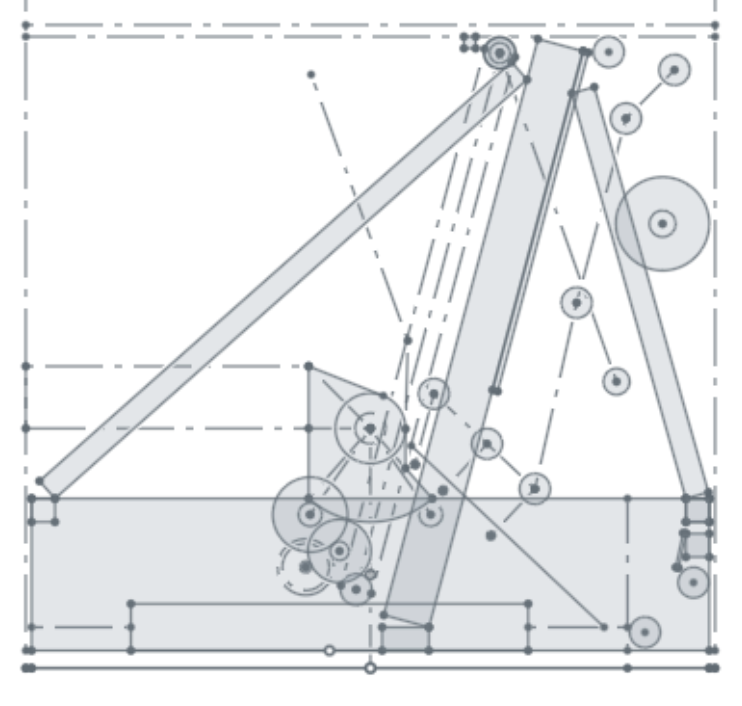
The largest change from AM to the competition robots (PM/FM) will be the launcher pivot. We are planning to use a sector gear mounted into the launcher and a custom gearbox to pivot the launcher through around 70 degrees of motion. We are also planning to use a constant force spring to default the launcher to the up position and remove some of the backlash in the system.
We have also begun construction of the competition robots. Swerve plates have been powder-coated and a few of the modules have been assembled. We have also cut most of the frame rails.
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.