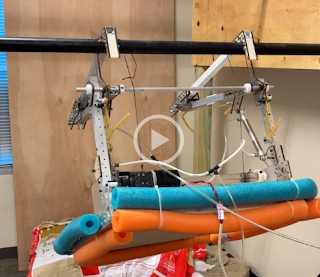
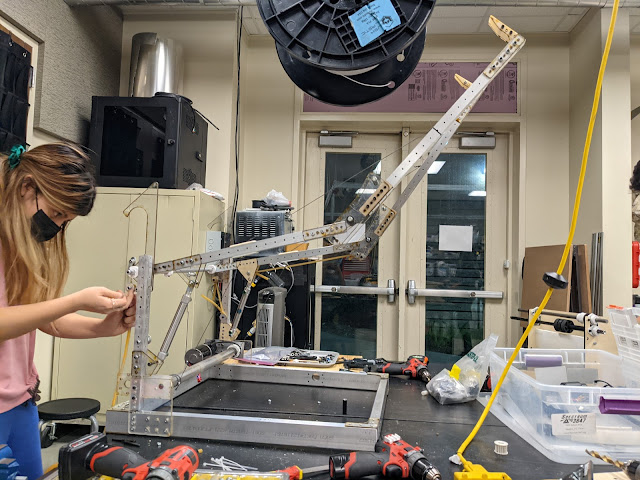
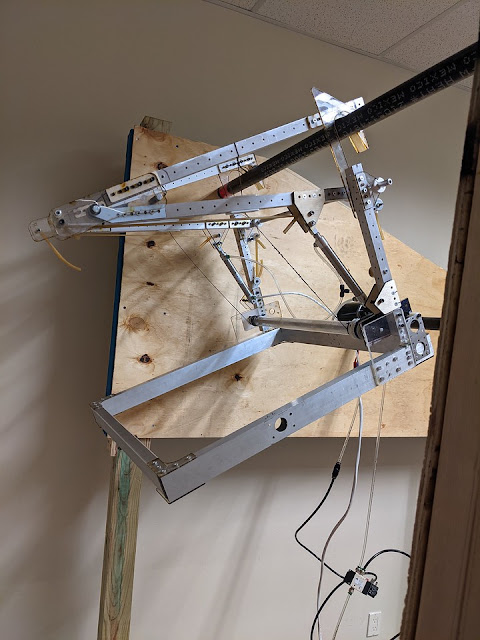
Intake Testing
We are working on finalizing our intake and ball path setup.
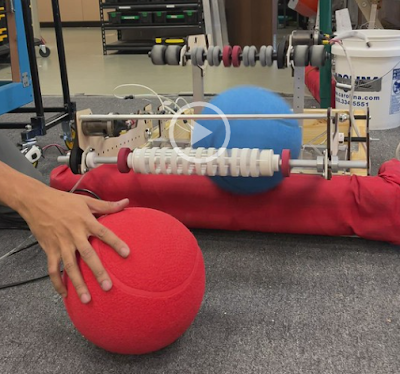
We will likely use some type of kicker bar that deploys at the start of the match to prevent the balls from easily slipping against the bumpers and ensuring a clean intake when we touch the ball.
The ball path behind the intake is still being worked on but it seems we will be able to have a normal roller without any mecanum or omni wheels and it will work fine. Passive wedges seem to work well to get the balls to center into the ball path.
The ball path behind the intake is still being worked on but it seems we will be able to have a normal roller without any mecanum or omni wheels and it will work fine. Passive wedges seem to work well to get the balls to center into the ball path.
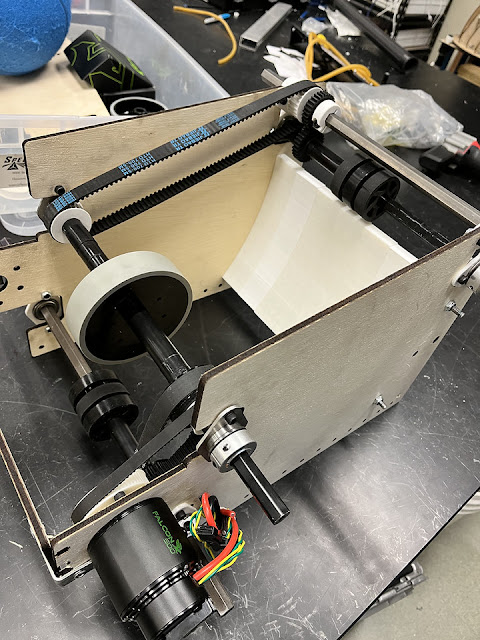
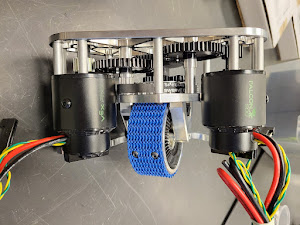
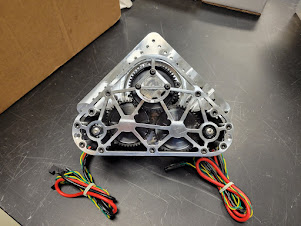
ProtoCube
We have gotten many comments on the devices we create to help us prototype. Tonight we quickly made a new one to help with climber and launcher testing to come soon.
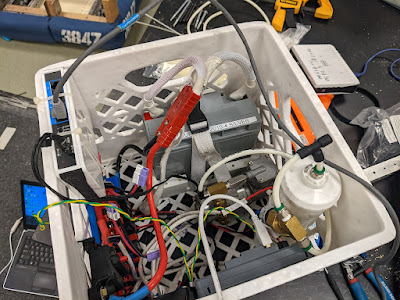
We quickly mounted a full FRC control system into a 2018 power cube, this way we will be able to automate parts of the climber testing, and also get velocity control on the Falcon500s we are using for launcher testing.
- Spectrum