
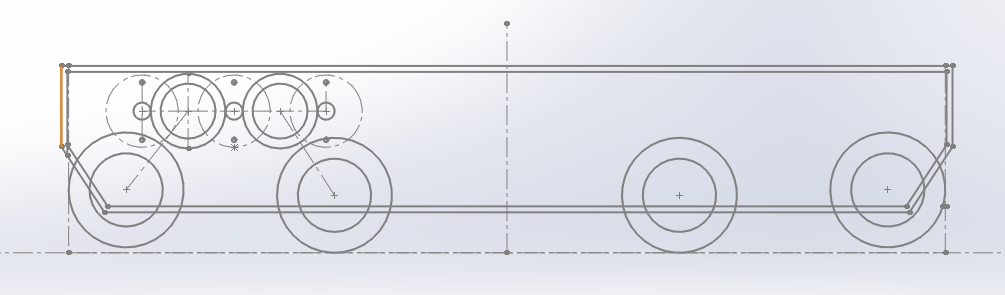
Drivetrain
- Eight Wheeled Drivetrain
- 4” wheels - no need to go any larger because no possibility of driving on to the HAB sideways; climbing is always forward
- Can go over cable cover and the depot rails
- The Year of No Belly Pan
- Drivetrain will have supporting interior framework but will have no belly pan due to our climbing mechanism
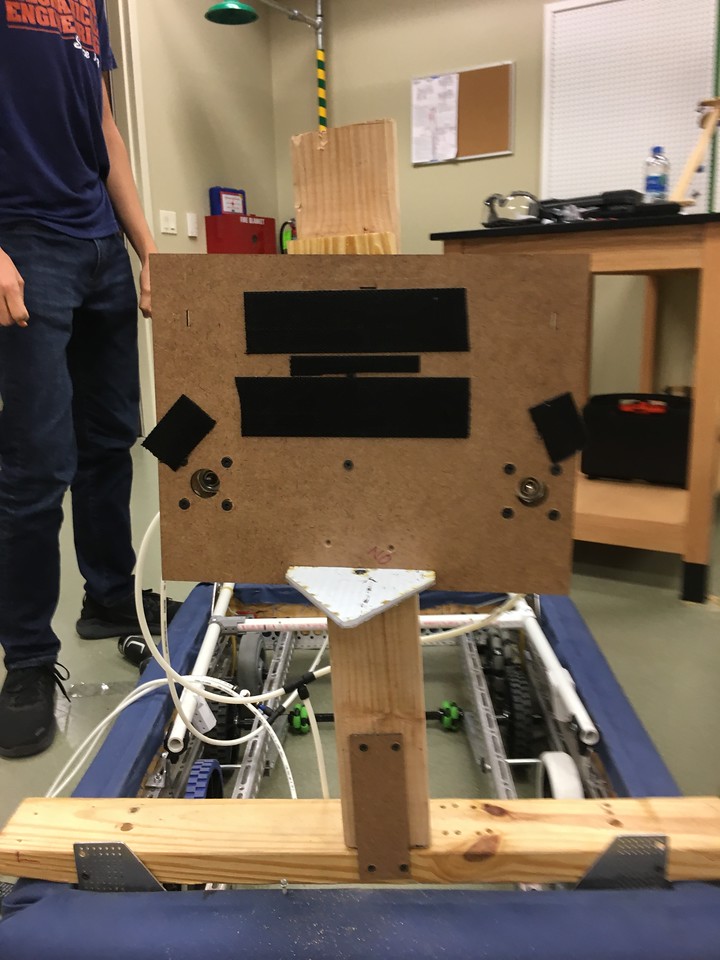
Hatch Mechanism
We made the hatch mechanism more closely reasonable the dimensions we are planning for our actual robot. We started testing alignment aids. Our hope is that as we drive into the disk and it raises up and aligns to the center of our mechanism. Initial tests are promising but it may not work perfectly.


Alignment
Aligning to the goals and the loading station is going to be crucial this year. We are putting most of our early programming thought in to how best to use cameras to help us align.
Our current plan is to use a wide angle camera mounted on top of our scoring mechanism that will move up and down with our lift so that our drivers can visually confirm that our hatch or cargo are ready to score. We plan to have a limelight vision system looking through our elevator at a fixed height to help us align to the vision targets from further away as we move towards the goals or station. Finally we are hoping to use a Jevois camera mounted on our frame at a height below our front bumpers to visually track the white tape as if it was a road.
- Spectrum
- Spectrum
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.