Week 6 Design Recap
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
Intake Testing
We were able to do some destructive testing of the intake and so far it looks pretty good. Some minor damage to the front bar which is just there to protect the roller from direct impacts anyway. We were already planning to switch that to polycarbonate so it shouldn't dent in the future.

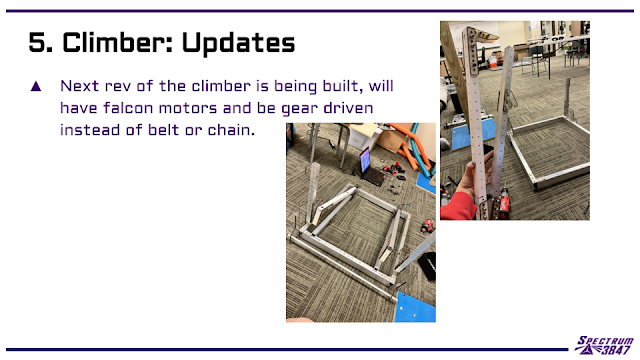
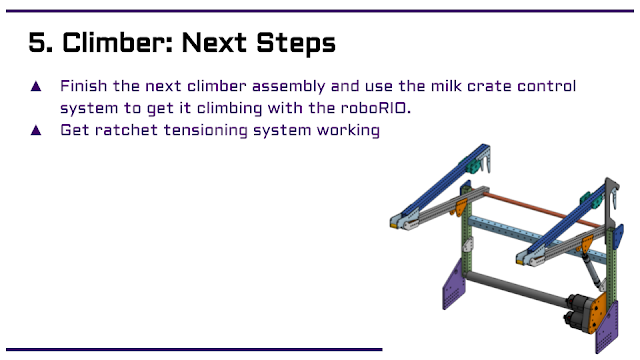
Climber Testing
The climber is working cleaner, the next steps will be to reduce the swinging and automate the climb. We will be getting the climber on the competition robot shortly.

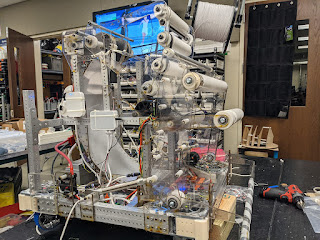
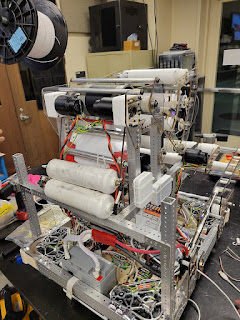
More progress photos
- https://photos.spectrum3847.org/2022-FRC-1/2022-Build-Season-1/Week-7/- Spectrum