
We compete in at the Houston district this weekend with both 3847 and 8515. Both robots have seen some upgrades to improve their performance. We worked to make our intake more inconsistent and remove the few jams and failure modes we saw at our first events. Software has been improved on both machines as well.
Feeding - When our robot is near the center line or beyond, it auto aims to a feed location and launches over the stage.
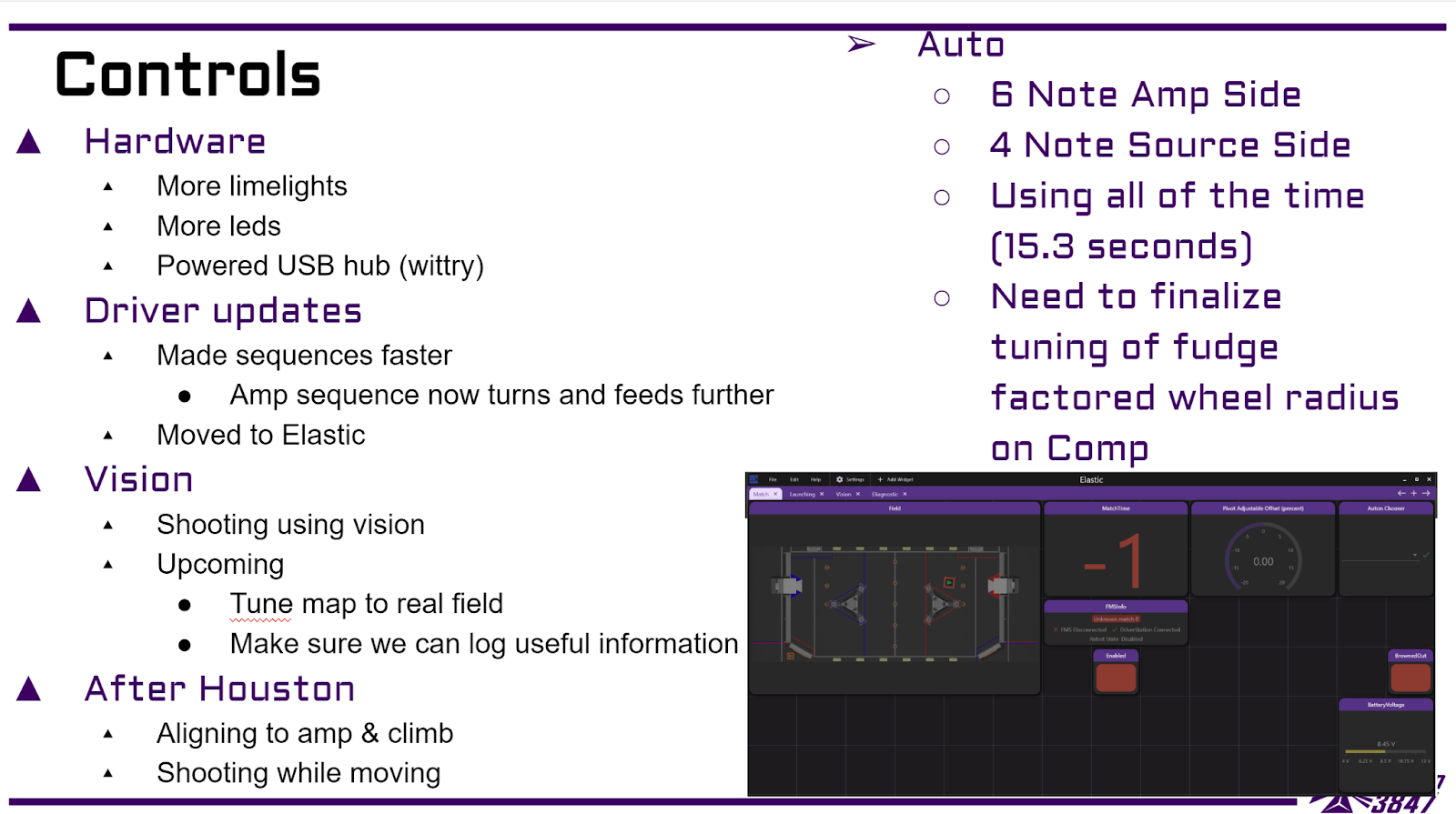
Vision Aim - We are using pose to aim to the speaker
Amp Launching - As a backup amp mechanism if our amptrap isn’t working.
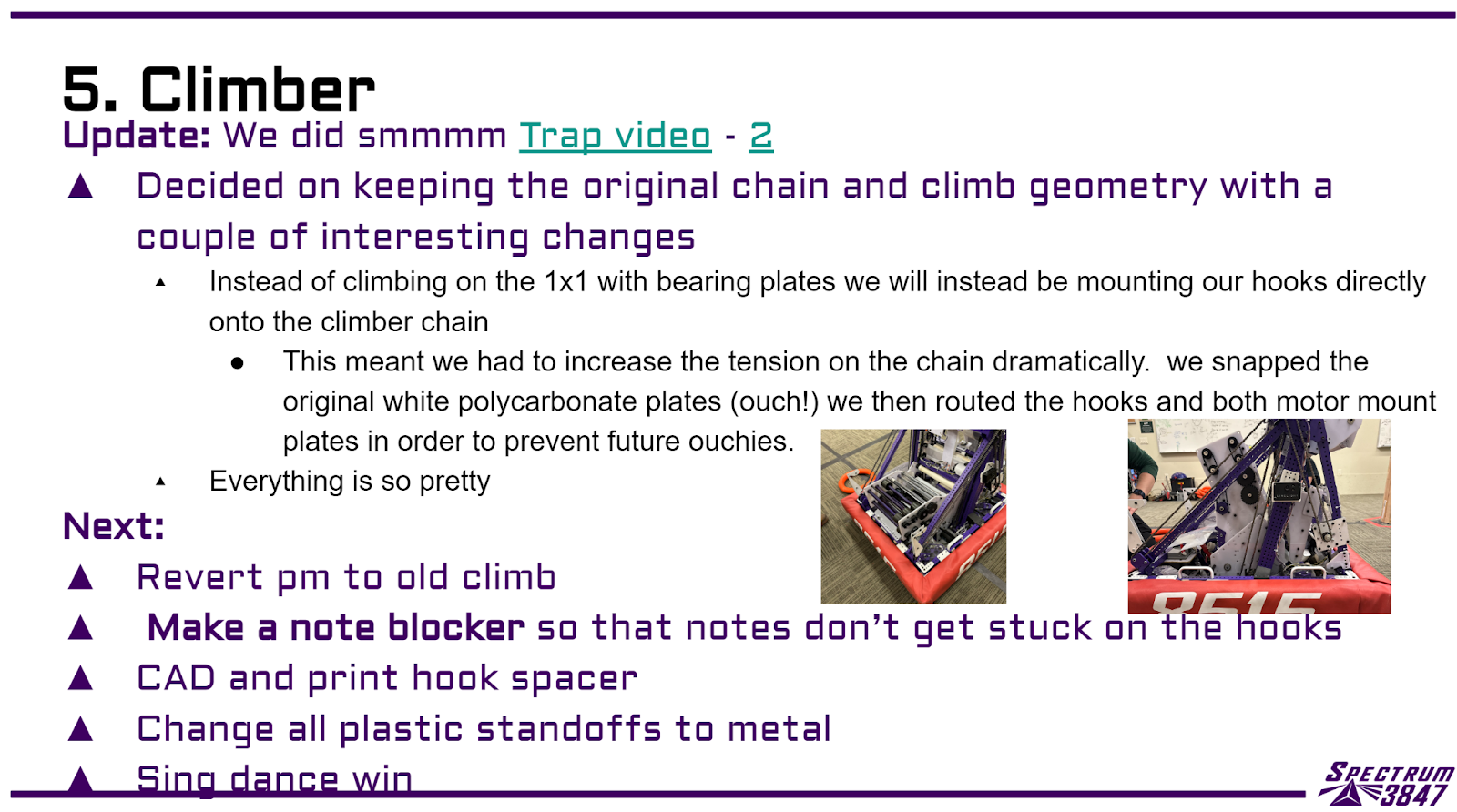
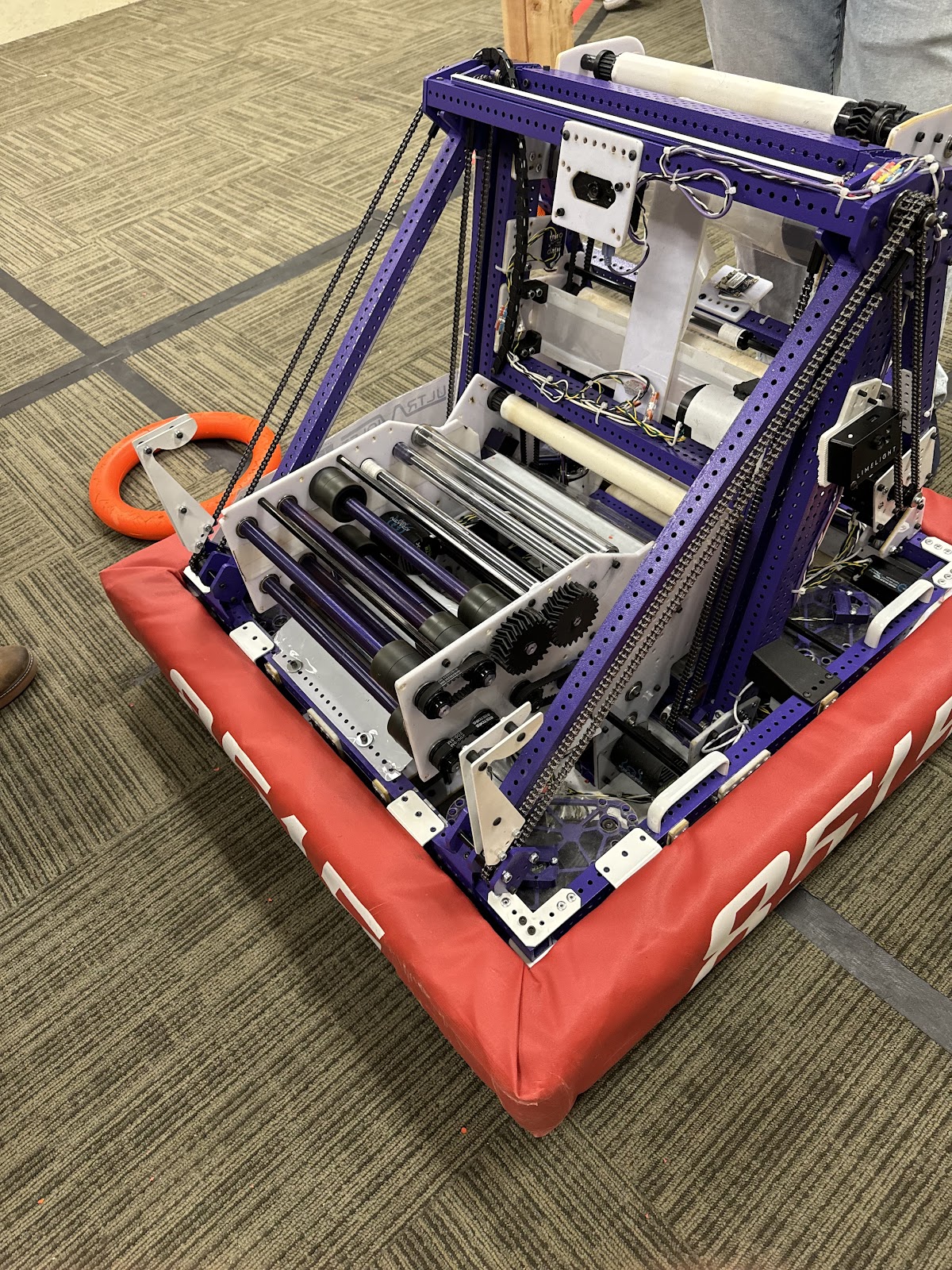
Trap Climb at 118’s Field
Trap Climb on our Stage
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.