

Results:
District Event Winner
Autonomous Award
Last weekend, Spectrum competed at the Belton District Event. We went 16-1-0 overall, and finished ranked 1st. We won every playoff match in the upper bracket and both finals matches. Thank you so much to our alliance partners 5414 Pearadox and 9054 Johnson City Joules!
We were honored to be awarded the first Autonomous Award in Spectrum history.

Failures and Fixes:
Failure: Qual 44 and playoff match 10. Cause unknown at the moment. Suspected RoboRio USB failure.
Qual 44:
Our robot stopped suddenly 7 seconds into autonomous. Driver station read “Autonomous Stopped”
We couldn’t move in teleop, although the RSL was blinking. We restarted roborio, during which we disconnected from the field, and we could finally move after roborio came back.
After the match: Question box. Official logs couldn’t find a cause of the failure, resulting in no replay. (This was the one match we lost by the way.)
Playoff 10:
Auton ended abruptly in a similar fashion to Qual 44, but driver station read “Autonomous Enabled.” Couldn’t move in teleop until after restarting RoboRio.
Fix: Unknown. It doesn’t add up to be a CAN issue. Unofficial AdvantageScope logs abruptly ended when the robot stopped moving. It’s possible the JVM is crashing but we didn’t lose robot code light on the DS. The USB bus fully failing would explain why the CANivore disconnects and the logs stop writing to the USB drive. We’re going to keep working on it. Please let us know if you’ve experienced something similar.
Failure: Roborio SD corrupted itself. This has happened several times this year to other teams
Fix: We had a prepared SD card, so we just had to change team number and upload code. Was relatively fast before Finals 2.
Failure: CAN disconnecting and reconnecting briefly, causing the robot to stop for a few seconds in teleop in a few matches.
Fix: Not sure, maybe it’s caused by the same USB roborio issue that was causing other failures, but it’s something to track back at the lab. (We’ve seen momentary CAN disconnects during driving on Alpha, PM, and Ultraviolet but diagnosing it has been hard without being able to replicate it).
Failure: Intake top roller seemed to bend weirdly, getting the note stuck between top roller and polycarb front rail blocker.
Fix: We replaced the top roller and that fixed the issue. We probably need to make that blocker slightly taller so the note can’t get stuck there.
Failure: Launcher standoff broke
Fix: Moved it to another spot

Failure: Battery polycarb cover broke
Fix: Switched which bolt holes we use and added washers to the mounts
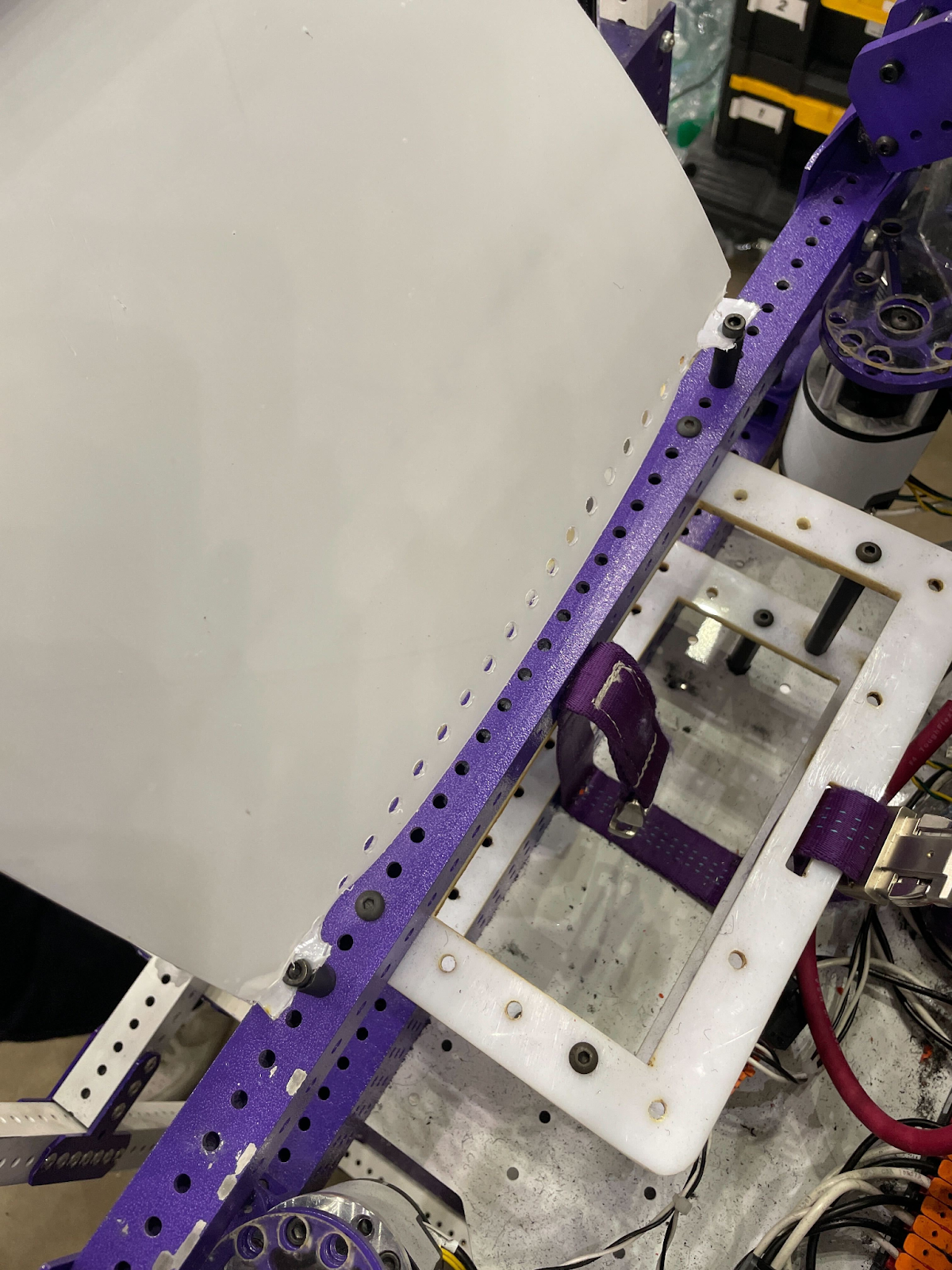
Failure: Bent lower intake rail. Didn’t affect performance as far as we could tell.
Fix: Replace it
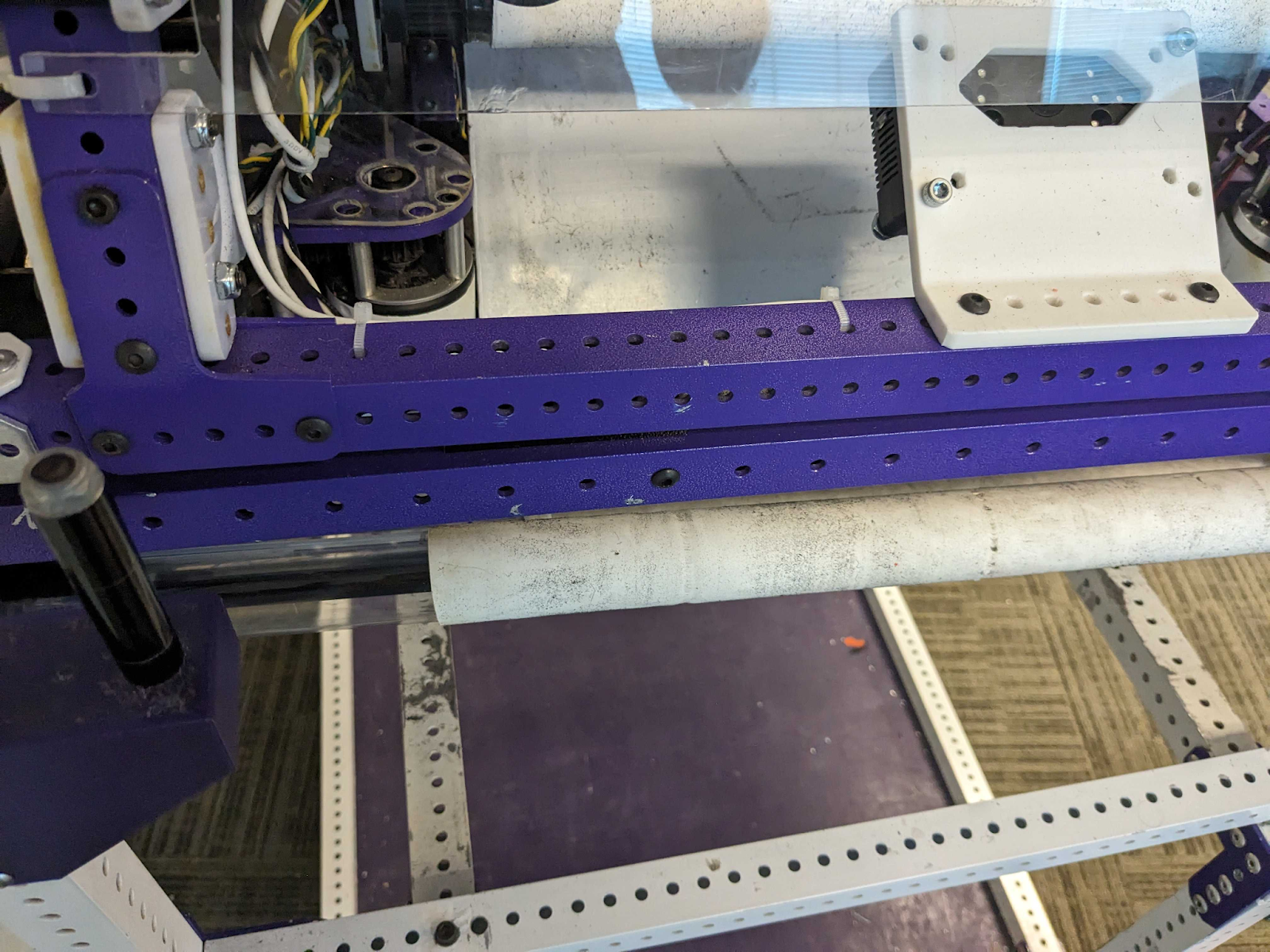
Failure: Amp trap gearbox got angled and eventually stuck.
Fix: Adding a 10-32 in the bearing hole stopped the cantilever and fixed the issue. (Originally tried with 8-32, but it fell out)
Failure: Intake kept misfeeding, flipping notes vertical.
Fix: Eject and re-intake fixed it in match. Will add a polycarb flap or something to force notes to stay horizontal after being intake.
Controls update:
Autonomous
We ran our center 5 note auton every match. It went very well.
Vision
We did not use vision at Belton, but we were logging lots of information about tag distance, and estimated pose from the cameras as well as trying out 3 strategies for integrating camera data into odometry pose. In order to align to field objects using pose we have to be able to keep pose as accurate as possible throughout the match, and the data will be useful in determining patterns to see when vision is most helpful.
Code changes
As for code changes during the event they were mostly minor in order to avoid regressions:
changed pilot turbo mode to slow mode
adjusted launch angle for podium shot
LED changes
Changed operator climb sequence to automate feeding the note up to amptrap
Planned Improvements:
Build the redesigned climber. More about it can be seen in this post. https://www.chiefdelphi.com/t/spectrum-3847-build-blog-2024/447471/413
Get pose working, auto aim working
Change sector gear reinforcements from aluminum to steel (we broke a few teeth on the polycarbonate plates.)
Pit Banner

No comments:
Post a Comment
Note: Only a member of this blog may post a comment.