Robot Design Plan Updates
A little more thought, some more white board drawings and conversations, and a few bench tests have led us to a few design changes for our prototypes.
1. Shooter - reduce some complexity with fewer rollers and feed wheels than planed. Shooter and tower moved towards the front of the robot, to allow a much easier ball path while keep the intake behind it.
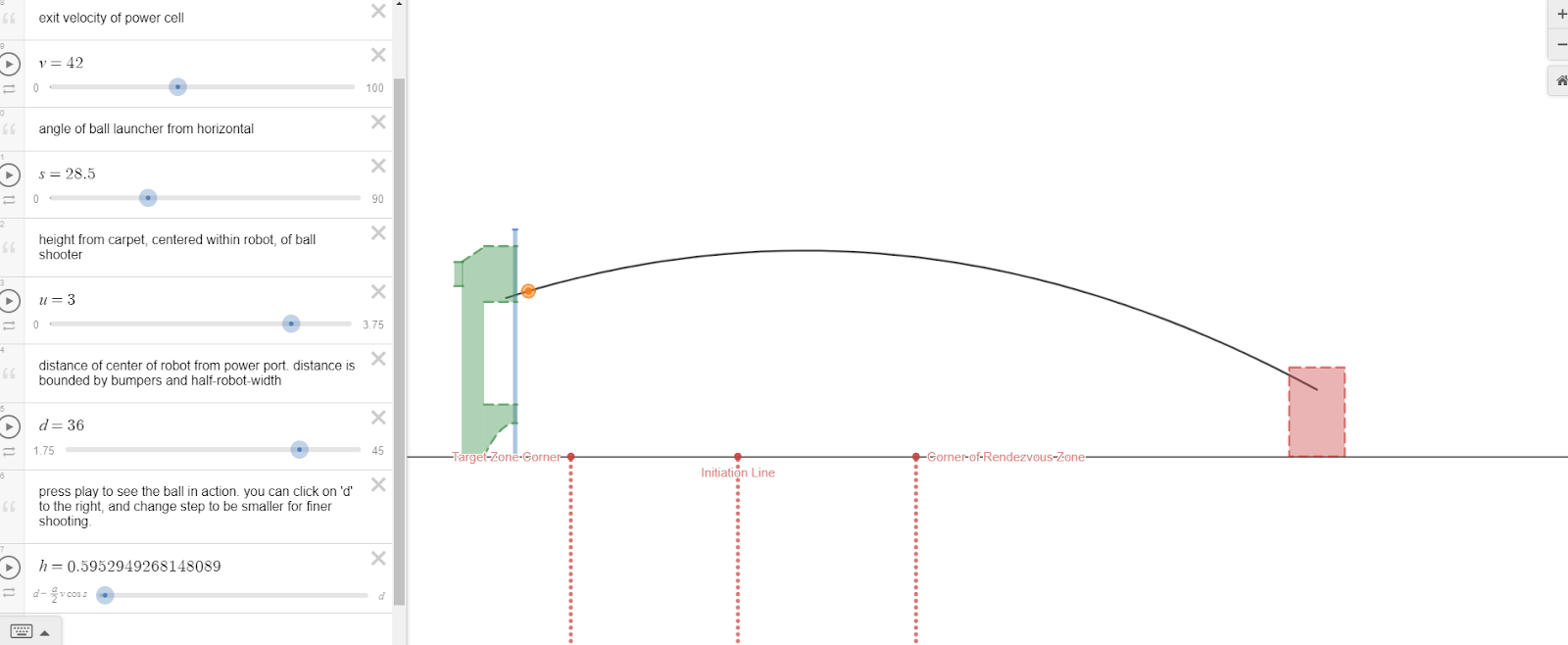
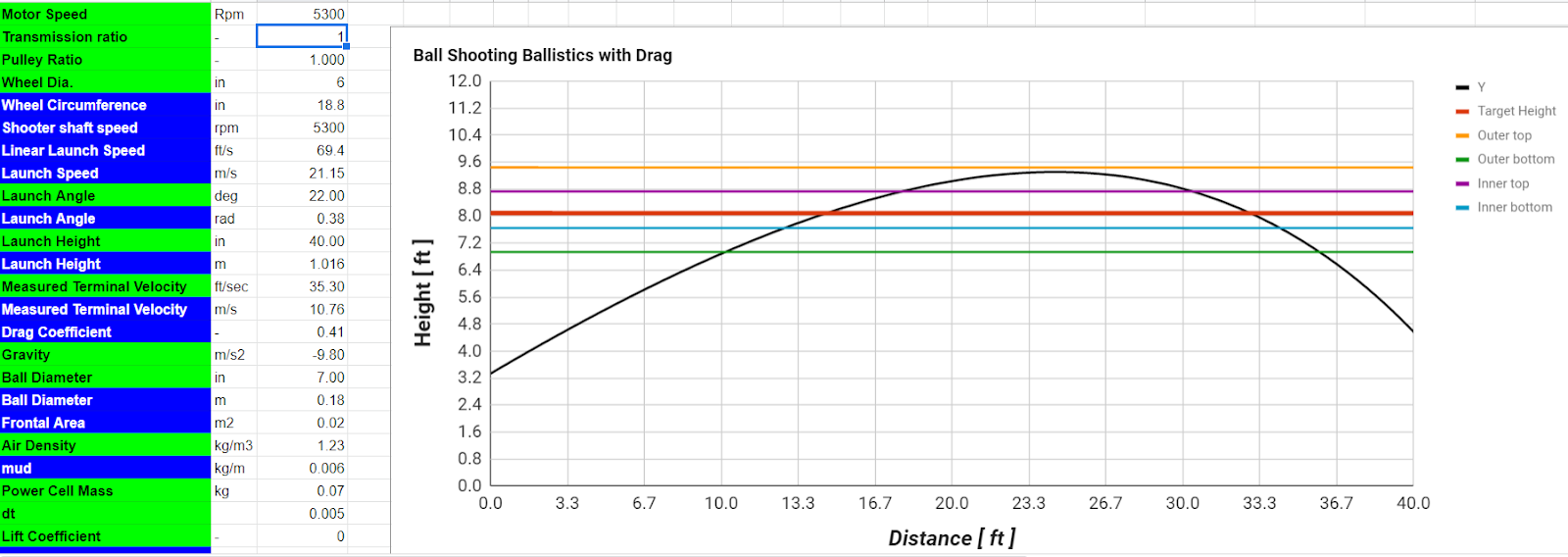
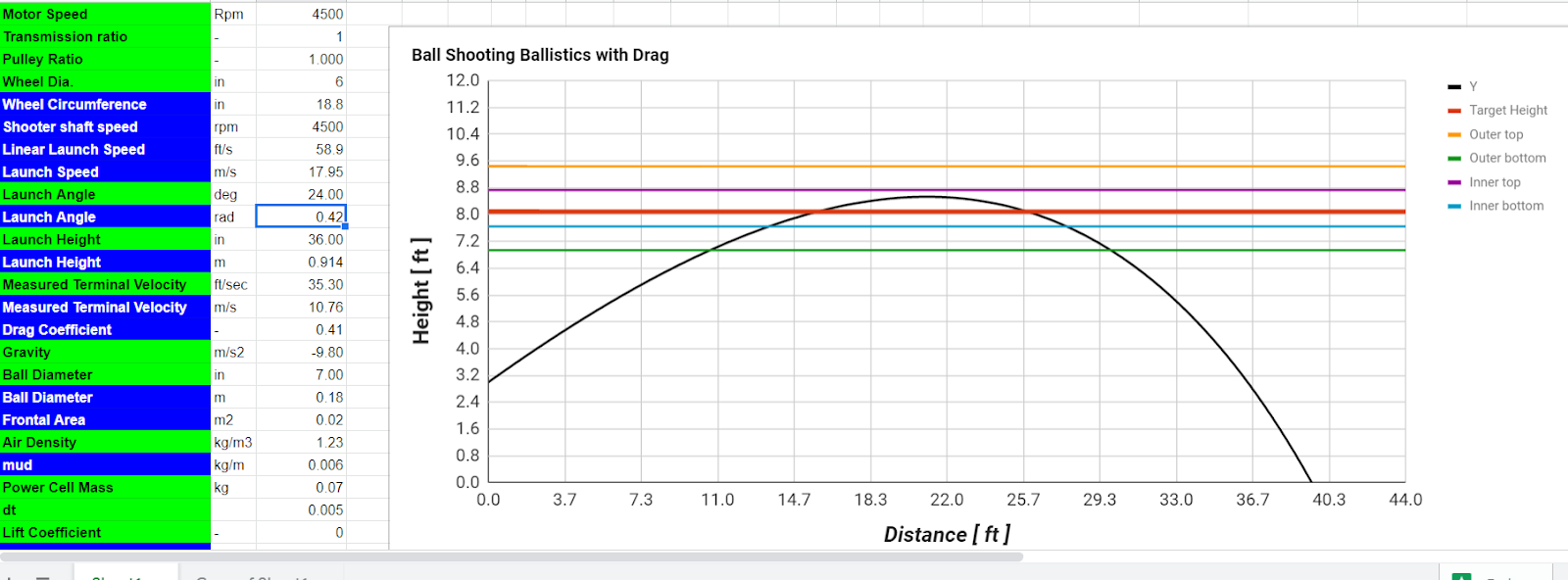
2. Shooter Hood - Two positions, a long wide shot that will make a ball into the 2 pt goal from behind mid court and up to the initiation line and a shallower angle that is specialized for 3 pt goal from a smaller range on the field. We are currently choosing to not shoot from the target zone.
3. Shooter Tower - Stop balls from entering the shooter by decompressing the top of the tower by moving one of the belts away from the ball.
4. Climber - doesn't need to be directly over our CG it's okay if we curl a little while we solo climb as long as our climber is rigid. Climber has also moved to a standard single stage 2x1 elevator as it now longer needs to stay below our shooter path as the shooter is turned around on our robot.
5. Buddy Climb - The buddy climb forks are now powered down instead of being sprung down. We believe this will let us make it easier to keep the forks on the floor even if our CG isn't directly under the hooks.

Drive Train Update
CAD has been underway on our drive train since Sunday. There is still work to do but it's coming along nice. We have had issues with a large sheet metal front rail on multiple instances so this year we are planning to combine sheet metal drive rails with an extrusion cross bar that are put into compression with threaded rod and some 3D printed inserts on the side of the tube ends..

Robots that inspired us today
2013 - 610 (drive construction)2019 - 148 (elevator & climbing legs), 971 (climbing legs and bumper mounting)
Sketch of the Day

Spectrum