

Results:
Finalists, Impact award, Deans list semi-finalist
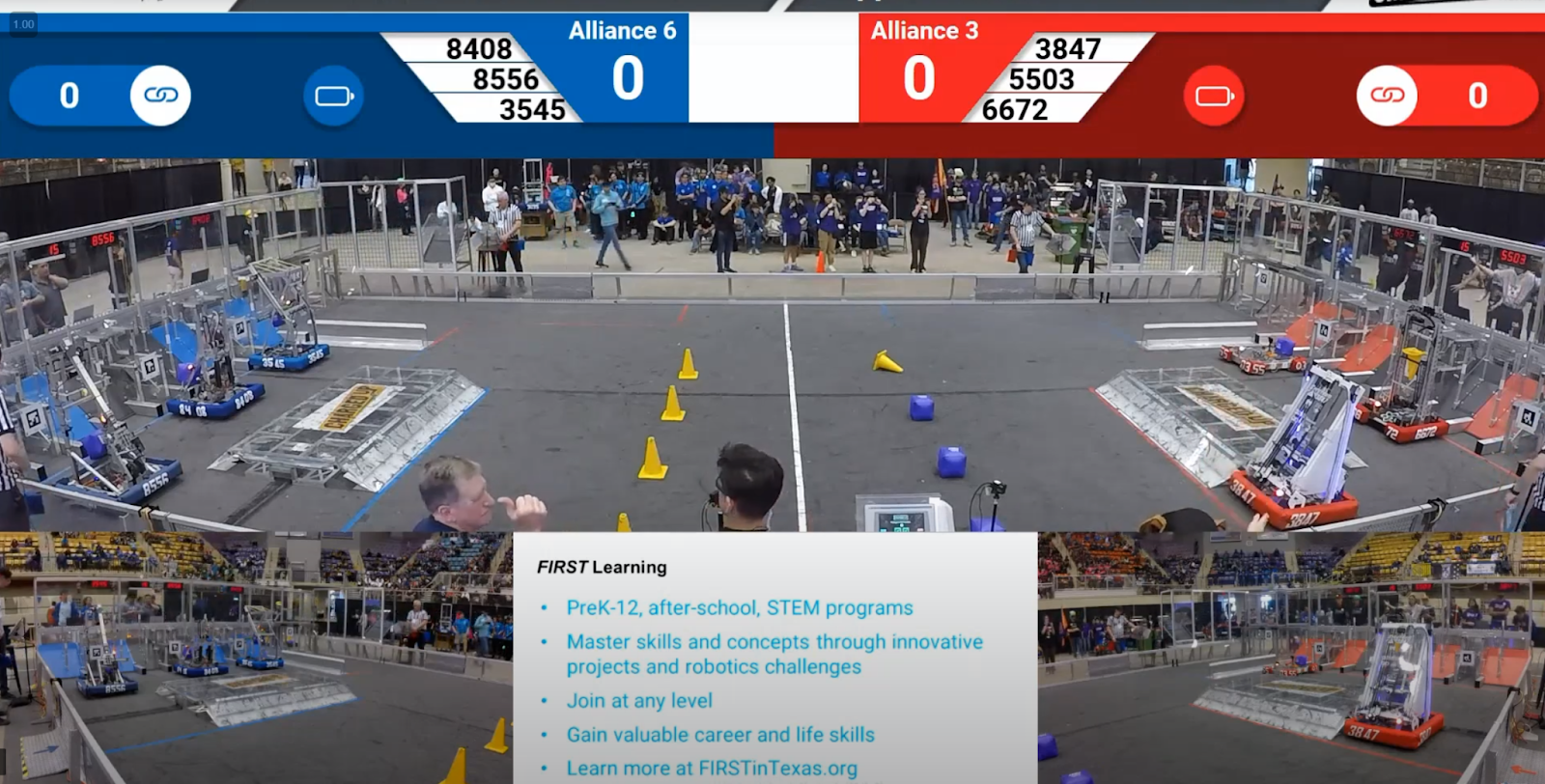
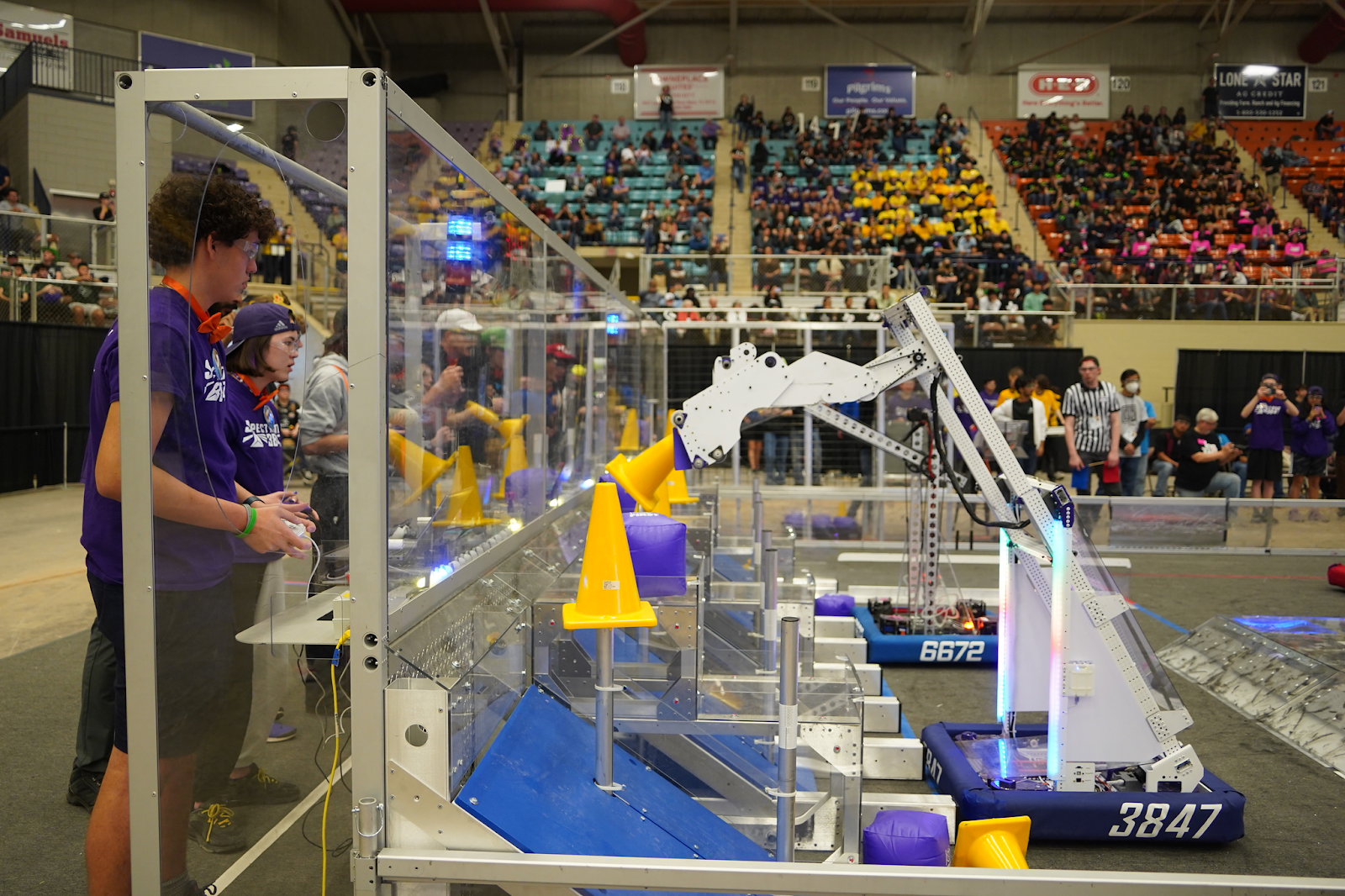
This Weekend Spectrum competed at the Waco District Event. We would first like to thank our alliance partners: 6672 Fusion Core and 5503 Smithville Tigertrons as well as congratulate the winning alliance of 624, 2881, and 8088.
Spectrum went 12-6 overall at the event, finished ranked 5th, and was invited by the 3 seed of 6672 to join their alliance. After inviting 5503 to join this alliance, we played through the top bracket upsetting the #2 and #1 seed alliances and falling against the 5th alliance in an extremely close tiebreaker finals match.
On top of having a successful event with the robot, we also were honored to receive the FIRST Impact Award and one of our team members was selected to move on to compete to be a Dean’s List Finalist at our District Championship.
Failures and Fixes:
Failure: Carriage derailment: our carriage twisted in place. This was a problem we saw once on our practice robot, we had already replaced the thin wall rev max tube with a thicker wall max tube and added 1/16” spacers behind our WCP bearing blocks but that wasn’t enough to prevent it from happening during the event.
Fix: We cut some extra extrusion we brought and made the carriage 9” tall, 3” taller than it was before. We were able to perform this fix between matches. This wasn’t a planned upgrade but a solution we developed at the event. Because of our continuous elevator, the fix didn’t require any adjustments to our setpoints or limit us in any way as we had about 6” extra in our first stage that we weren’t using to score top cones.
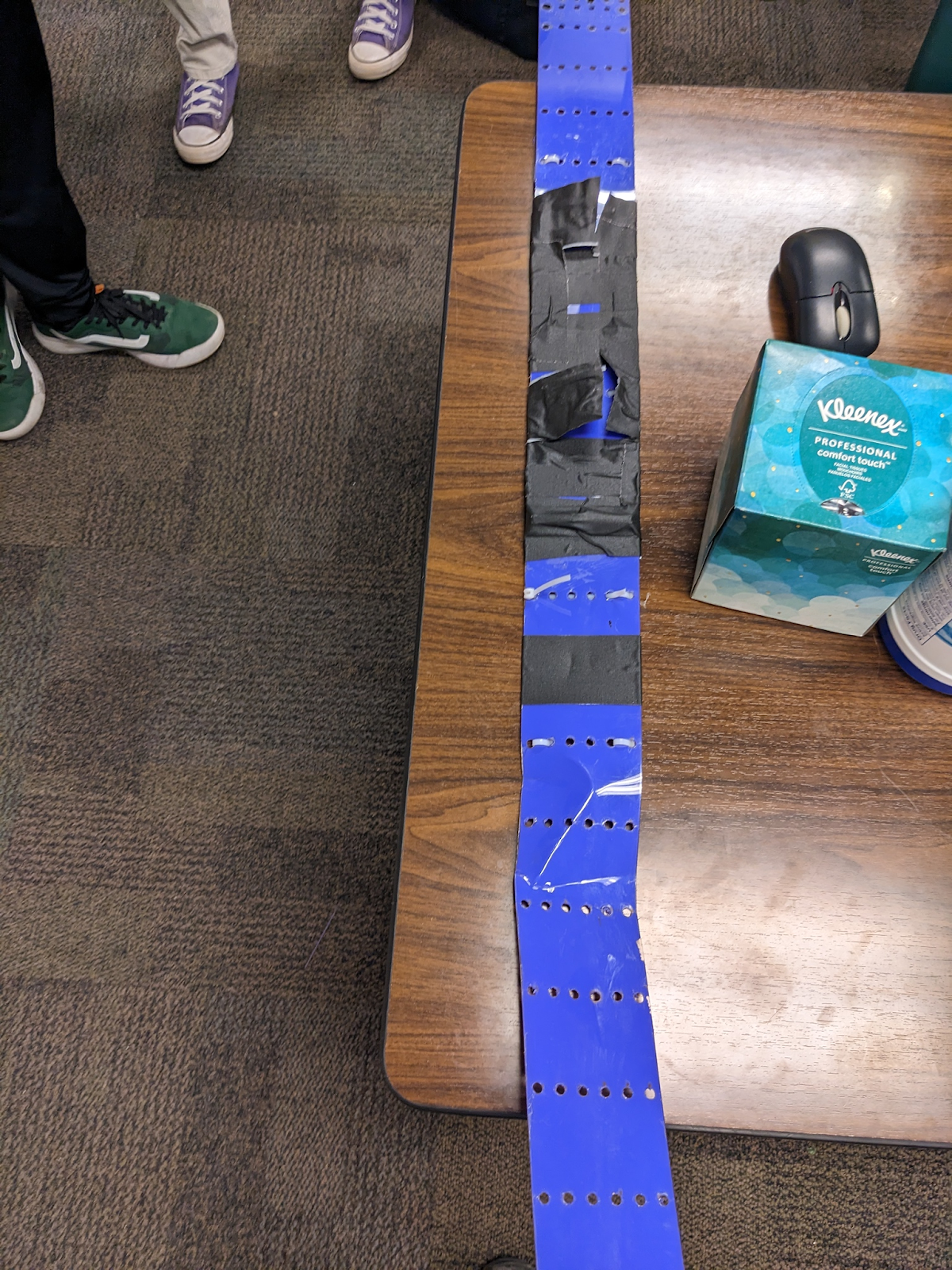
Failure: Cable carrier snapping
- Once as the elevator went up while scoring a cone. The polycarb had already been dented a bit, but one of these dents finally snapped. We remedied it with some backup polycarb and tape, but this did not last long.
- In a later match, we reversed quickly when the elevator was up, and the cable carrier got caught between stages. It snapped completely and fell off the robot. This also caused the four-bar motor to be disconnected.
Fix: We wrapped all the cables in gaff tape and tied the wire bundle down with a string. This allowed us to continue to use the elevator and not catch the wires on anything.

Failure: Camer mount bent. We believe this happened because of the cable carrier problem above, when the cable carrier got caught it bent the camera mount.
Fix: Replace it with the spare. We will likely make this slightly thicker in future versions to prevent it from ever getting caught by the carriage.
Failure: Lower Intake Roller 3D printed pinion pulley friction locked to the polycarb motor mounting plate.
Fix: We replaced it with metal versions of that pinion that we had always intended to run for competition but had never replaced. This problem never caused an issue during a match, it was discovered during a system check in the pit.

Failure: The lower intake pulley slammed into the four-bar arms a couple of times, forcing the belt off and rendering the intake useless.
Fix: We fixed tension by slightly increasing the diameter of one of the idlers. We also printed a new spacer that should have kept the belt on a pulley. We had one more failure of this kind during the tournament so we will continue to improve this belt run.’
Failure: We had a few wood screws back out or shear on our bumpers.
Fix: We just rescrewed them, but we are working on a better bumper attachment system for our next events.
Failure: Carnivore booted into a new USB cable state and cause to sit idle for match 34.
Fix: Replaced the carnivore USB-C cable, and checked it’s status light after boot up before leaving the field before each of our matches.

Failure: network switch failure prior to finals 2. We believe we left a cut thru ethernet cable (it got cut by the carriage weeks ago) installed in our robot and someone inadvertently connected to our switch and it shorted out somehow. This did not cause us any issues in a match. (Thank you 15 min match breaks)
Fix: VHBed the spare switch on top of the old one and played finals 2 and 3 with that switch.
Controls Update
Autonomous:
We ran a three-cube auton sequence for most of this event. Auton was strangely inconsistent. The robot would dodge the staged cubes right after a match where it launched all three perfectly. The most consistent part of auton was the first cube launch, which landed in the top or middle cube node regularly.
Our best Auton Performance was in our first playoff match where we landed a cube in 1 top node and 2 cubes into the mid-nodes.
Video
Self-Driving (On the Fly Path following)
Self-Driving did not work at this event. We eventually determined that if the robot touched the charging station or cable bump, odometry would get messed up and self-driving would break for the rest of the match. Our LimeLight 3 was reading april tags correctly but we haven’t adjusted the pose estimator to quickly enough adjust our estimated position to correct for the large odometry errors. It did work once during a match where we didn’t go on the charge station in auton.
Planned Improvements:
Improve autonomous repeatability and switch to starting the match by scoring a top cone.
Increase intake gap distance to allow for better cube intaking. We had some issues with cubes not entering the intake cleanly.
Enable closed loop heading control at all times the pilot isn’t steering the robot, this should eliminate some of the drift that we saw this weekend and enable features like auto-locking the robot parallel to the grid for easier scoring.
New Cable carrier/management plan for the elevator
New/improvement bumper mounting
Improve lower roller belt and pulley setup to prevent it from ever skipping in the future.
Strategy/Scouting Recap
Scouting: Things went rather smoothly. We had many new scouts and being the first event there were a few hiccups such as keeping all the tablets and laptops charged but we were able to get good data and share it here after the first day of matches. Thanks to 2719 and Ty Trembly for developing their QR scout program, this is our 2nd year of using it and it has helped us immensely.
Pick List Meeting: This was a complicated and long pick list meeting. Waco was a relatively balanced event with multiple (8-9) robots capable of scoring 5+ game pieces per match. The rankings at the end of Friday did not make it clear who would be the top seed at the event so we had many things to look at and discuss throughout the night. The overall goals of the pick list meeting are for our team to better understand 2 things, who are the top teams at the event and how would we rank/tier them, and then for us to get 24 robots into our tiers so we know if we are on the #1 alliance we will have a pick ready if all our other choices are taken. Sorting the top 8-9 robots took quite a while (and this ended up changing a good amount before alliance selection on Saturday morning) and even longer to get to 24 in our higher tiers. We finally wrapped up a little before 1 am. (about 3 hours of meeting).
Alliance Selection: The last qualification match and a replay were needed to set the top 5 seeds. 6377 Howdy Bots were able to lock the #1 seed by securing 3 RP in the final qualification match and 6672 was able to move up to the #3 seed in a replay of qualification match 69. This ended up being extremely important during alliance selection. Waco saw the #2 and #3 seeded teams decline invitations from the #1 because of how strong a field existed to draft from. We were very excited to be picked by 6672 as we had never gotten to be in an alliance with them even though we have known them for a few years now. Once selected we were able to find each other in the stands and pretty seamlessly worked to get a list together for our third pick and were very happy to see 5503 was still available for us to pick. We worked with the Smithville Tiger Trons in 2022 at Dripping Springs and knew they would be ready to work with us to do well in the playoffs.
Story Time: Load In Tornado Warning
Load in was quite the adventure for us. As we were approaching the venue just after 7pm Thursday night when we start getting texts that the area is under a Tornado watch and we may not be able to load in as there is likely going to be a shelter-in-palace order once it elevates to a warning.
We were able to pull in and unload our bus and equipment in just under 10 minutes and while I was moving the bus I started feeling the winds pick up and dust started swirling in the parking lot. I was able to get back in the building but another team in a charter bus pulled in and we need to help get their students out the bus and into the building before the winds picked up any worse without the tornado sirens going off. Everyone was brought into the building safely.
The event was under a shelter in place order for around 30 to 40 minutes before we were allowed back into the pits to continue with inspections and getting ready for the matches the next day. And we were able to help the other team get loaded in after the warning was over.
Thank Yous
Thank you to our sponsors REV Robotics, Solarcraft, Inc, the Gene Haas Foundation, Analog Device, Texas Workforce Commission, Intuitive Foundation, International Society of Automation, Houston Chapter, QAD Works & St Agnes Academy & Strake Jesuit College Preparatory.
Thank you to all the volunteers that helped make Waco an awesome event.
Photo Gallery Link
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.